Watson-Marlow MM440 User Manual
Page 86
3 Functions
Issue 10/06
MICROMASTER 440 Operating Instructions
86
6SE6400-5AW00-0BP0
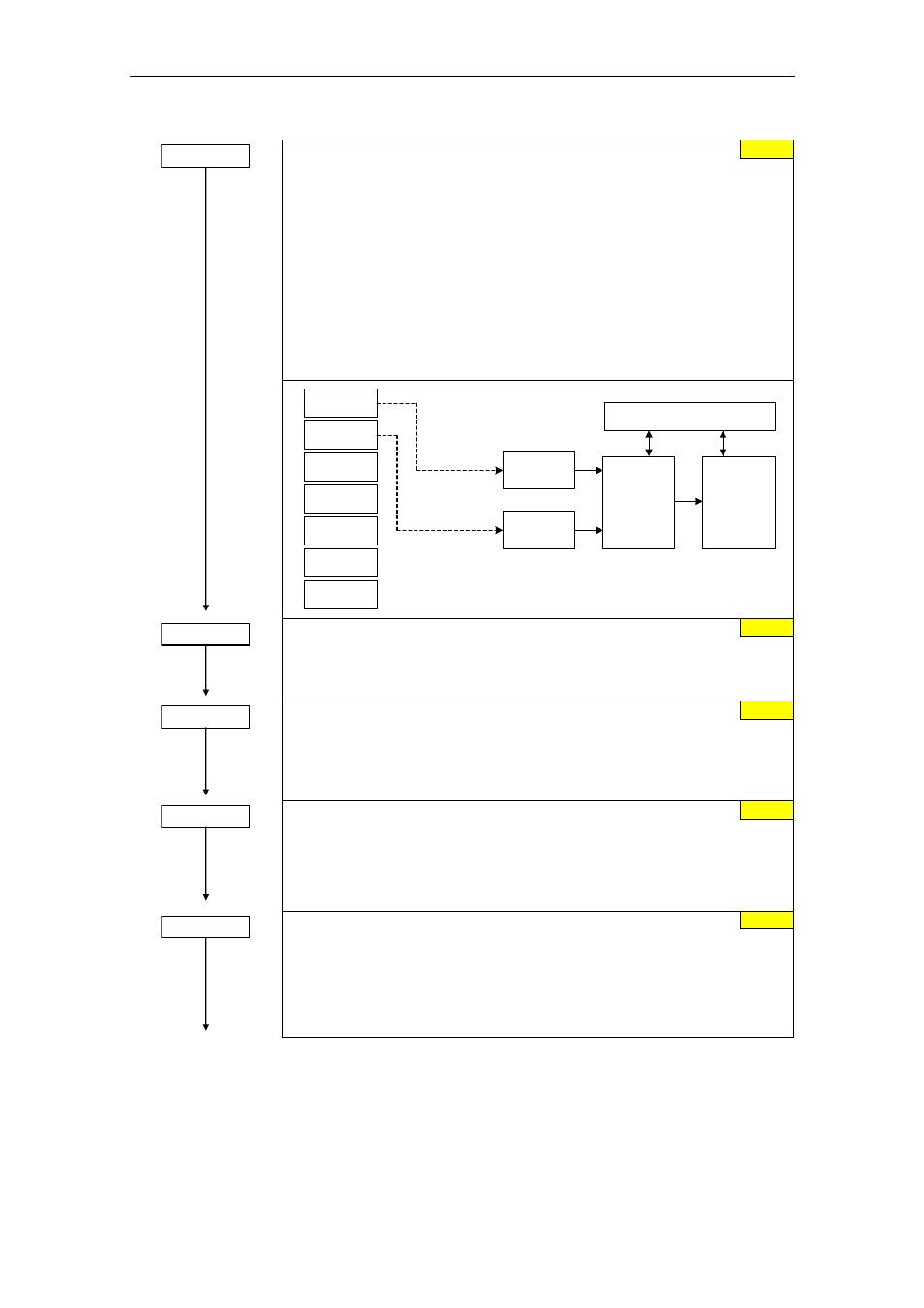
P1000 =...
Selection of frequency setpoint *
(enters the frequency setpoint source)
1 MOP setpoint
2 Analog setpoint
3 Fixed frequency
4 USS on BOP link
5 USS on COM link (control terminals 29 and 30)
6 CB on COM link (CB = communications module)
10 No main setpoint + MOP setpoint
11 MOP setpoint + MOP setpoint
12 Analog setpoint + MOP setpoint
...
76 CB on COM link + Analog setpoint 2
77 Analog setpoint 2 + Analog setpoint 2
MOP
ADC
FF
USS
BOP link
USS
COM link
CB
COM link
ADC2
P1000 =
1
2
P1000 = 1
2
Sequence control
Main
setpoint
Setpoint
channel
Motor
control
Additonal
setpoint
P1080 =...
Min. frequency
(enters the minimum motor frequency in Hz)
Sets minimum motor frequency at which motor will run irrespective of frequency
setpoint. The value set here is valid for both clockwise and anticlockwise rotation.
P1082 =...
Max. frequency
(enters the maximum motor frequency in Hz)
Sets maximum motor frequency at which motor will run irrespective of the
frequency setpoint. The value set here is valid for both clockwise and
anticlockwise rotation.
P1120 =...
Ramp-up time
(enters the ramp-up time in s)
Time taken for motor to accelerate from standstill up to maximum motor
frequency (P1082) when no rounding is used. If a ramp-up time is parameterized
which is too low, then this can result in alarm A0501 (current limit value) or the
drive inverter being shutdown with fault F0001 (overcurrent).
P1121 =...
Ramp-down time
(enters the deceleration time in s)
Time taken for motor to decelerate from maximum motor frequency (P1082) down
to standstill when no rounding is used. If the ramp-down time is parameterized too
low, then this can result in alarms A0501 (current limit value), A0502 (overvoltage
limit value) or the drive inverter being powered-down with fault F0001
(overcurrent) or F0002 (overvoltage).
2
0.00 Hz
50.00 Hz
10.00 s
10.00 s