1 vector control without speed encoder (slvc) – Watson-Marlow MM440 User Manual
Page 245
Issue 10/06
3 Functions
MICROMASTER 440 Operating Instructions
6SE6400-5AW00-0BP0
245
3.23.2.1 Vector control without speed encoder (SLVC)
Parameter range:
P1400 – P1780
P1610, P1611
P1755,
P1756,
P1758
P1750
Warnings -
Faults -
Function chart number:
FP7000
When Vector control is used without speed encoder (refer to Table 3-40) then the
position of the flux and the actual speed must be determined using the motor
model. In this case, the model is supported by the accessible currents and
voltages. At low frequencies (
≈ 0 Hz), the model is not able to determine the speed.
This is the reason and also due to uncertainty in the model parameters and
measuring inaccuracy, that a changeover is made from closed-loop to open-loop
controlled operation in this range.
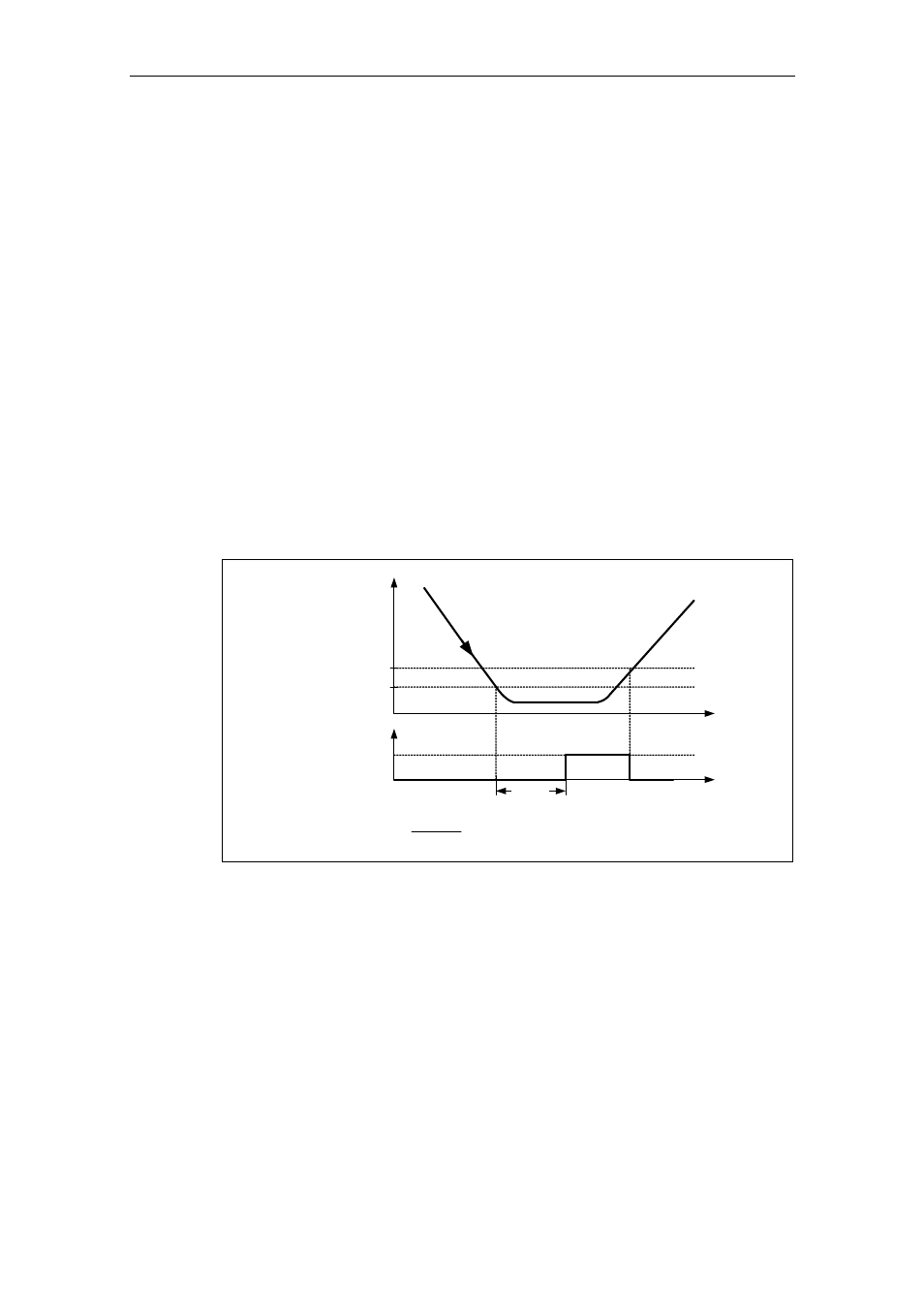
The changeover between closed-loop controlled / open-loop controlled operation is
controlled using the time and frequency conditions (P1755, P1756, P1758) (refer to
Fig. 3-102). The system does not wait for the time condition if the setpoint
frequency at the ramp-function generator input and the actual frequency
simultaneously lie below P1756.
SLVC open loop
£
f_act£
t
P1755
P1756 [Hz]
SLVC closed loop
P1758
t
[%]
100
[%]
P1756
[Hz]
P1755
[Hz]
P1756
⋅
=
Fig. 3-102
Changeover condition for SLVC
In the open-loop controlled mode, the speed actual value is the same as the
setpoint. For suspended loads or when accelerating, parameter P1610 (constant
torque boost) and P1611 (torque boost when accelerating) must be modified in
order to allow the drive to provide the steady-state and/or dynamic load torque. If
P1610 is set to 0 %, then only the magnetizing current r0331 is impressed for a
value of 100 % of the rated motor current P0305. In order that the drive does not
stall when accelerating, P1611 can be increased or the acceleration pre-control
can be used for the speed controller (refer to Section 3.23.2.3). This is also
practical in order that the motor is not thermally overloaded at low speeds.
For Vector control without speed actual value encoder MICROMASTER 440 has, in
the low frequency range, the following outstanding features with respect to other
AC drive inverters: