Watson-Marlow MM440 User Manual
Page 220
3 Functions
Issue 10/06
MICROMASTER 440 Operating Instructions
220
6SE6400-5AW00-0BP0
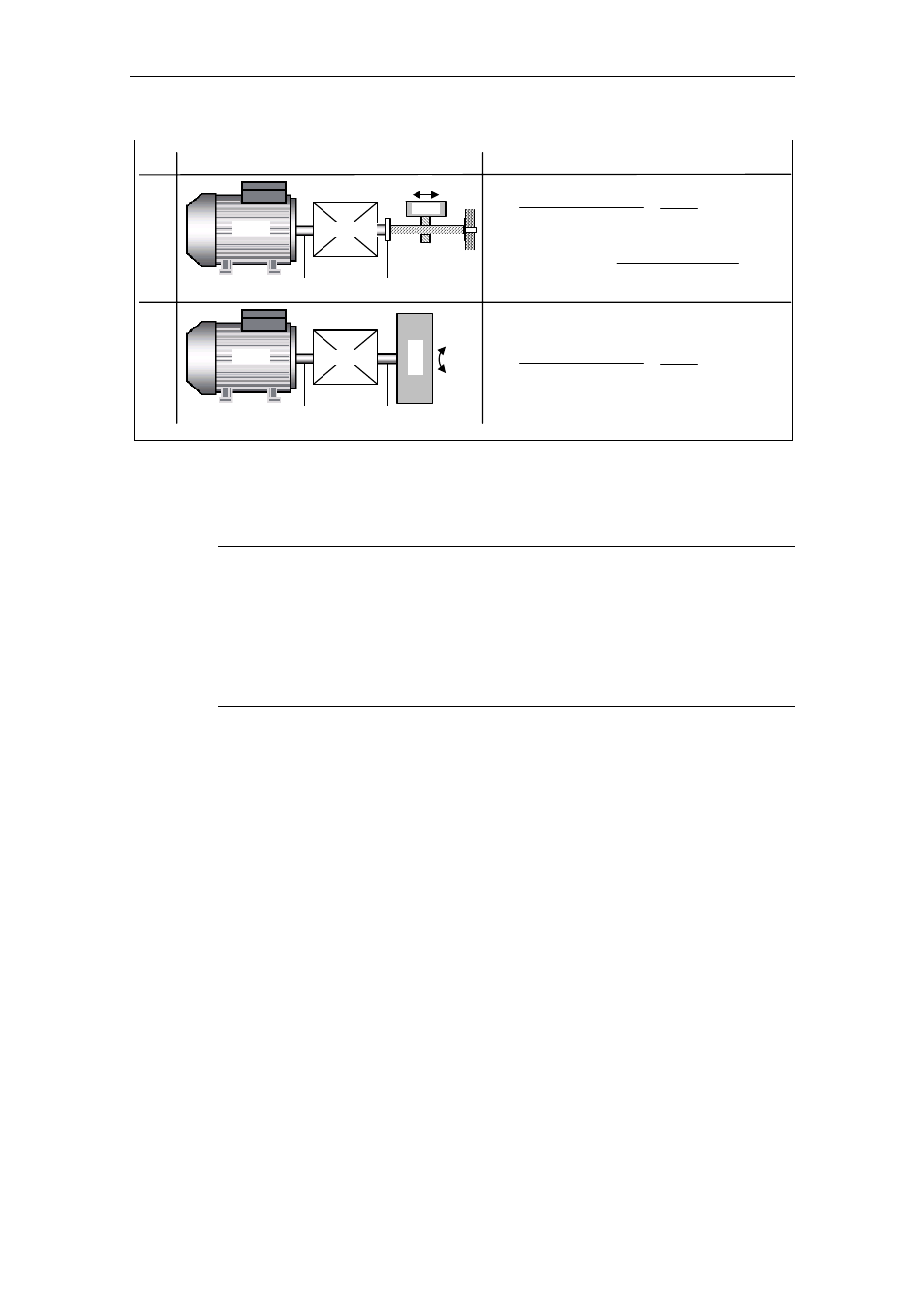
n
n
Motor
Load
Ü
Ü =
P2482
P2481
=
Motor revolutions
Load revolutions
Motor
lin
rot
Gear
Parameter
Disposition
Lo
ad
s
rot
No. of revolutions
1 [unit]
Ü =
P2482
P2481
=
Motor revolutions
Load revolutions
n
n
Motor
Load
Ü
Motor
Gear
s
lin
Load
z
z = screw spindle =
= P2484
Fig. 3-86
Rotary or linear axis
Using this data, MICROMASTER 440 calculates the ratio between the distance
and the motor revolutions and can therefore consider the movement on the load
side.
NOTE
¾
When the positioning down ramp is enabled using parameter P0500 = 3, then
implicitly the control mode P1300 is reset as follows as a function of parameter
P0205:
a) P0205 = 0
→ P1300 = 0
b) P0205 = 1
→ P1300 = 2
This change can be undone again after the positioning down ramp has been
enabled by modifying parameter P1300.