Delta RMC101 User Manual
Page 66
Appendix C: An Example
RMC100 Startup Guide
66
deltamotion.com
− If the system starts oscillating or chattering, decrease the Differential
Gain.
− The Sum Error
2
decreased to 177,000.
• Increase the Acceleration Feed Forwards to get rid of the following errors
during acceleration and deceleration.
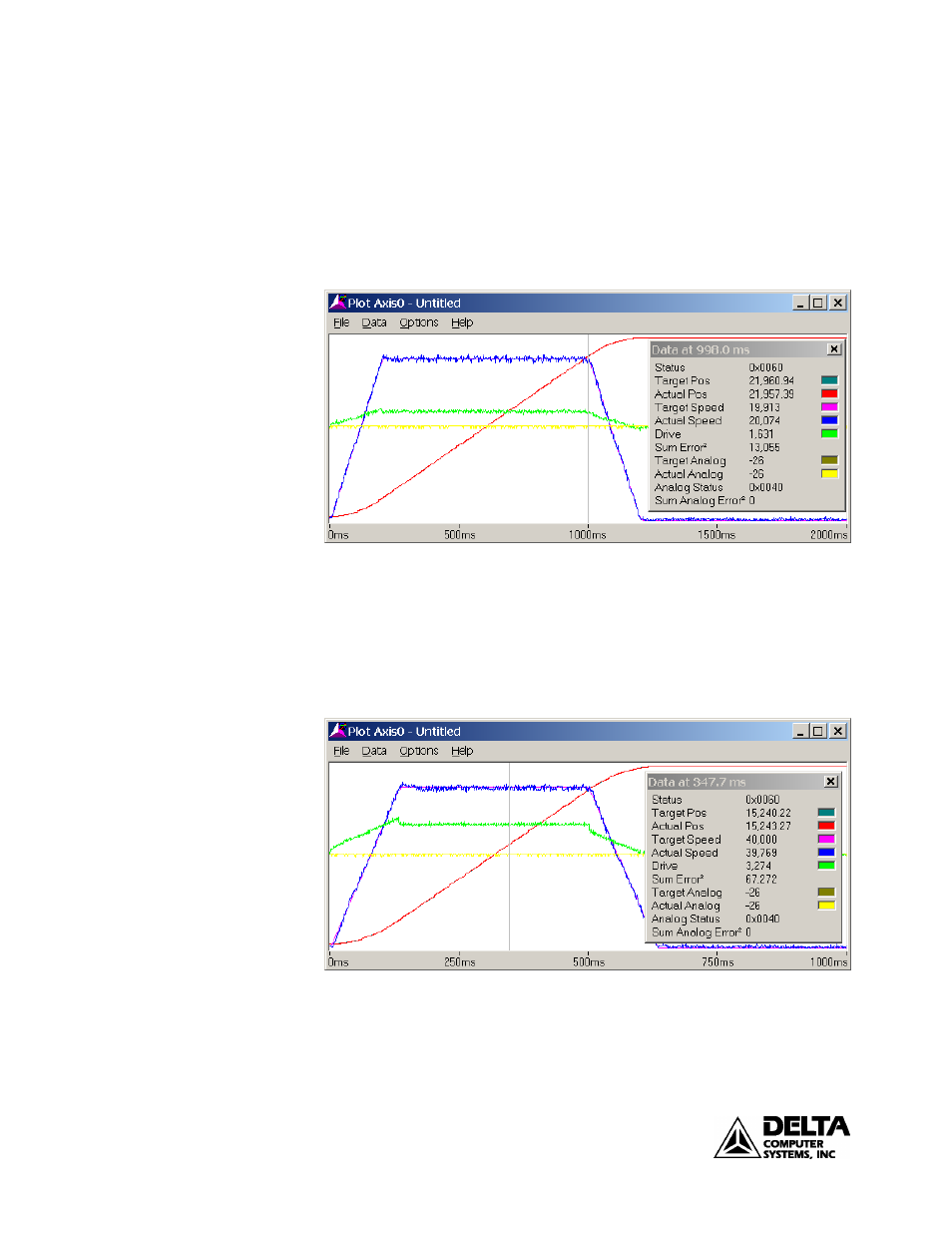
• After increasing the Acceleration Feed Forwards to 200, the plot looks like
this:
− The Sum Error
2
decreased to 13,000!
− The overshoot disappeared.
− The Extend and Retract Feed Forwards are generally not the same for
hydraulic systems.
• The position is now fairly well tuned. To check that this will work at
higher speeds, increase the Accel and Decel to 300 and the speed to 40000.
The plot (plot time = 1 sec) looks like this:
− The parameters work well for the higher speed (no lagging, overshoot
or oscillation) and will be left unchanged.
− The Sum Error
2
increased, but that is only because of the higher speed,
which inherently results in greater position errors.