Drive and transducer interface choices, Auxiliary modules – Delta RMC101 User Manual
Page 29
RMC100 Startup
RMC100 Modules
29
deltamotion.com
Drive and Transducer Interface Choices
Nine different I/O modules are available for the RMC100 Motion Controllers. Each
motion I/O module handles two axes, and RMC100 controllers can be configured
with one, two, three, or four I/O modules. I/O modules can be “mixed and
matched” for control of as many as eight axes with one motion controller. When
combined with the communication module choices, this I/O module flexibility
results in more than 500 configurations of the RMC100 motion controller available
off-the-shelf. Motion I/O modules are available with analog or stepper drive
outputs and interfaces for a wide variety of position feedback devices. Your choice
of Interface Modules will depend on the required performance and compatibility
match with your feedback devices and physical system.
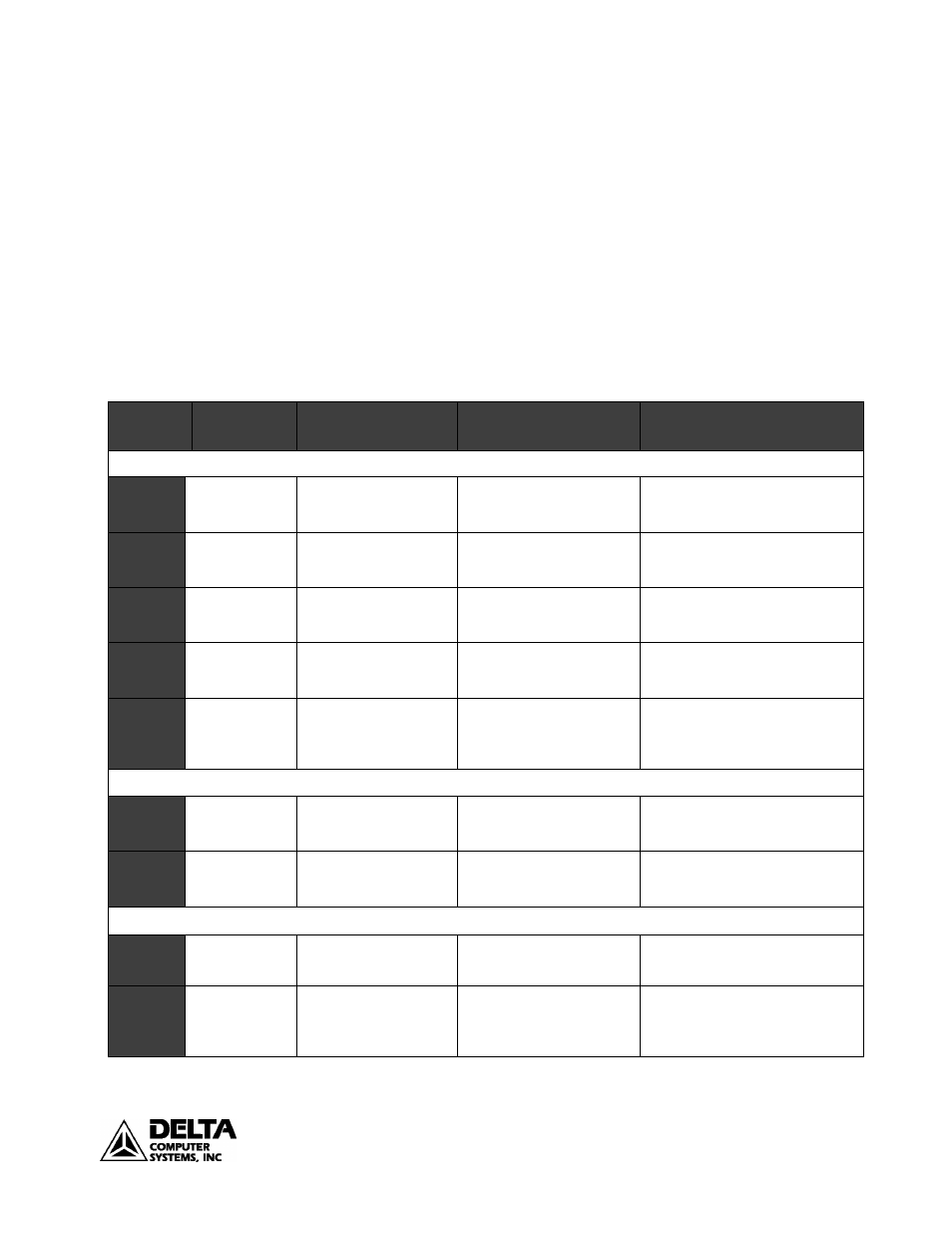
RMC100
Interface
Module
Outputs
Inputs
Transducer
Compatibility
Performance
Motion Modules (Position Interface, Drive Outputs)
-Mn
2 Drive, ±10V*,
12-bit analog
2 MDT, PWM or
Start/Stop, RS-422
differential
Most MTS (Temposonics),
Balluff, and similar types
Absolute position, 120MHz count
rate for 0.001” res (one recirc)
-Sn
2 Drive, ±10V*,
12-bit analog
2 SSI, Binary or Gray
Code, 8-25 bits, RS-
422 differential
Absolute rotary encoders,
MDTs with compatible SSI
Absolute or incremental position,
High resolution, noise immunity
-Qn
2 Drive, ±10V*,
12-bit analog,
2 Enables
2 Quadrature (A, B, Z),
RS422 differential, and
6 discrete, 5-24Vdc
Quadrature encoders with
RS422 signals
Incremental position, 4,000,000
counts/sec, fast response to
index and home
-QSTn
2 Drive, Step &
Direction,
2 Enables
2 Quadrature (A, B, Z)
RS422 differential, and
6 discrete, 5-24 Vdc
Quadrature encoder
optional (with RS422
signals)
Drives up to 1 MHz, open or
closed loop, 4,000,000
counts/sec quadrature
-SSTn
2 Drive, Step &
Direction,
2 Enables
2 SSI, Binary or Gray
Code, 8-25 bits, RS-
422 differential
SSI transducer optional
(Absolute rotary encoders,
MDTs with compatible
SSI)
Drives up to 1 MHz, open or
closed loop, High resolution, high
noise immunity SSI, absolute
position
Motion or Auxiliary Modules (Analog Inputs for Position, Pressure, etc. Drive Outputs)
-Hn
2 Drive, ±10V*
12-bit analog,
+10V Exciter
4, 16-bit differential
analog
0-10V, ±10V, 0-5V, ±5V,
4-20mA
Absolute Position, Pressure or
Force, Position/Pressure
-Gn
2 Drive, ±10V*
12-bit analog,
+10V Exciter
2, 16-bit differential
analog
0-10V, ±10V
Absolute Position, Pressure or
Force, Position/Pressure
Auxiliary Modules
-An
None
4, 12-bit differential
analog
0-10V, ±10V, 0-5V, ±5V,
4-20mA
Analog reference, Pressure or
Force
-Dn
8 discrete SSR
(Solid State
Relay), 2.5kV
isolation
18 discrete, sinking,
Logic Polarity
configurable, 2.5kV
isolation
Outputs: ±30V, ±100mA,
1.5ms propagation delay
Inputs: 5-24V 6-10mA
max 2.0ms response
Comm DI/O, Fast response to /
triggering external events
*Use Delta’s VC2100 Voltage-to Current converter to convert ±10 Volts to current