Delta RMC101 User Manual
Page 65
RMC100 Startup
Appendix C: An Example
65
deltamotion.com
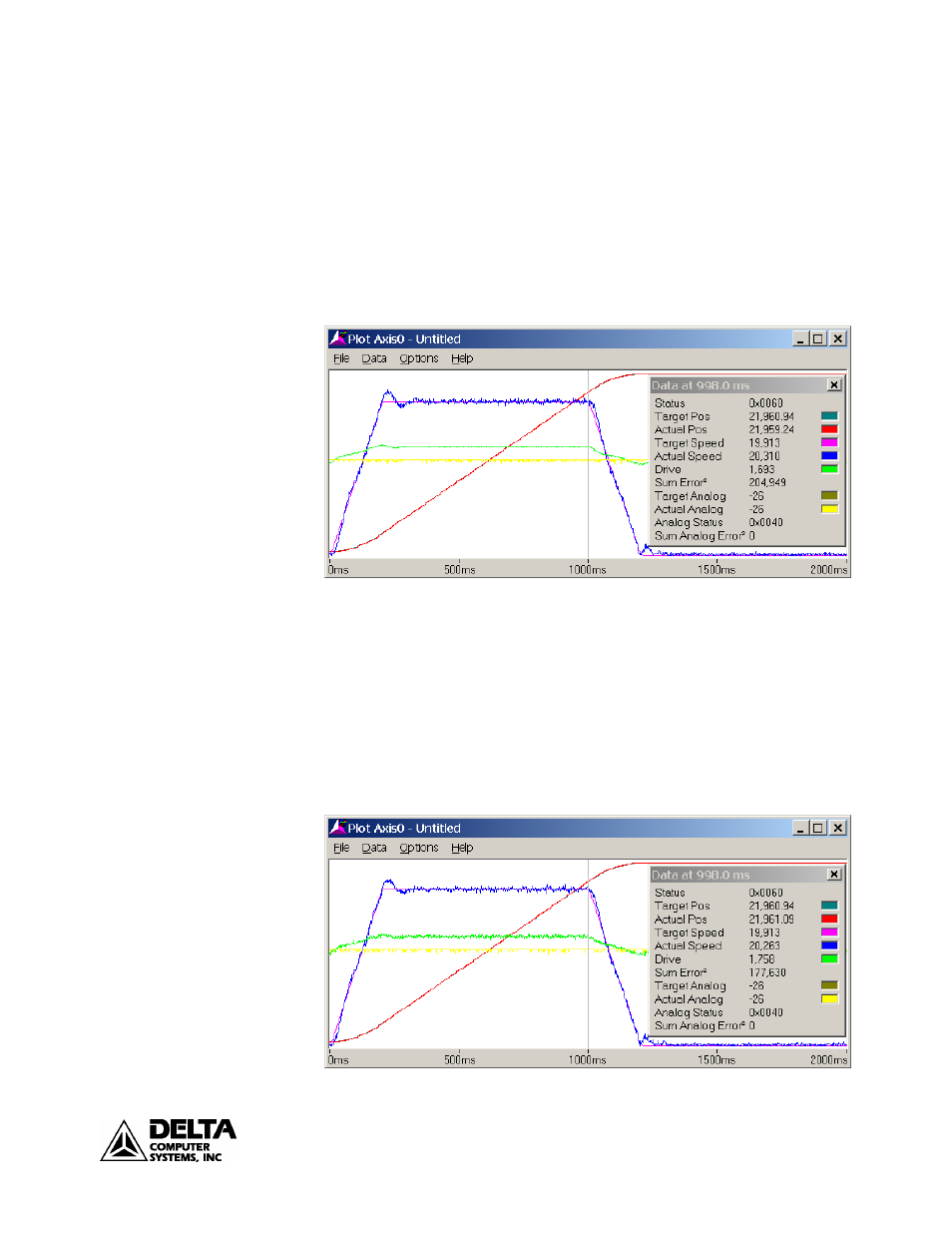
− The position lags during the constant speed portion of the move, which
the next step will address.
• Make a fairly long move without any oscillations. Issue a Feed Forward
Adjust (F) command. The Retract Feed Forward value is automatically
updated to 84 in this case.
• Make a move in the opposite direction. Issue a Feed Forward Adjust (F)
command. The Extend Feed Forward value is automatically updated to 84
in this case.
• Make a move. The axis should track much better now:
− The Sum Error
2
decreased from 27 million to 204,000!
• The next step is the integral gain. Gradually increase it as long as it does
not adversely affect the system. Generally, the Integral gain does not need
to be extremely high. In this example, 150 was deemed enough. The plot
(not shown) did not change much from the previous one. This does not
mean the integral gain won't help! It is important for dynamic changes that
may be encountered during system operation and may not be present
during the tuning.
• Increase the Differential Gain. In this example, it was increased to 250.
When the Differential gain is high enough, the drive output may look
fuzzy: