Delta RMC101 User Manual
Page 62
Appendix C: An Example
RMC100 Startup Guide
62
deltamotion.com
• The position feedback is to be measured in thousandths of inches, so 1000
position units per inch is entered in the Desired Position Units field.
• The transducer gradient information in the Transducer field is found on
the transducer.
• To set the offset, the following steps are performed
− Retract the cylinder all the way. This can be done by issuing anOpen
Loop (O) command with a small amount of drive.
− When the cylinder is all the way retracted, the transducer shows 1024
counts in this example.
− If this is the desired zero point, click the button in the Offset field and
it automatically enters 1024 into the counts field.
− …increasing counts is selected in the Increasing counts equal…
field.
• Set the desired extend and retract limits to 0.100 and 52 inches. This
system can extend 52.700 inches, but it is undesirable to ever reach either
end.
• Click Apply and Done.
• Issue a Set Parameters (P) command.
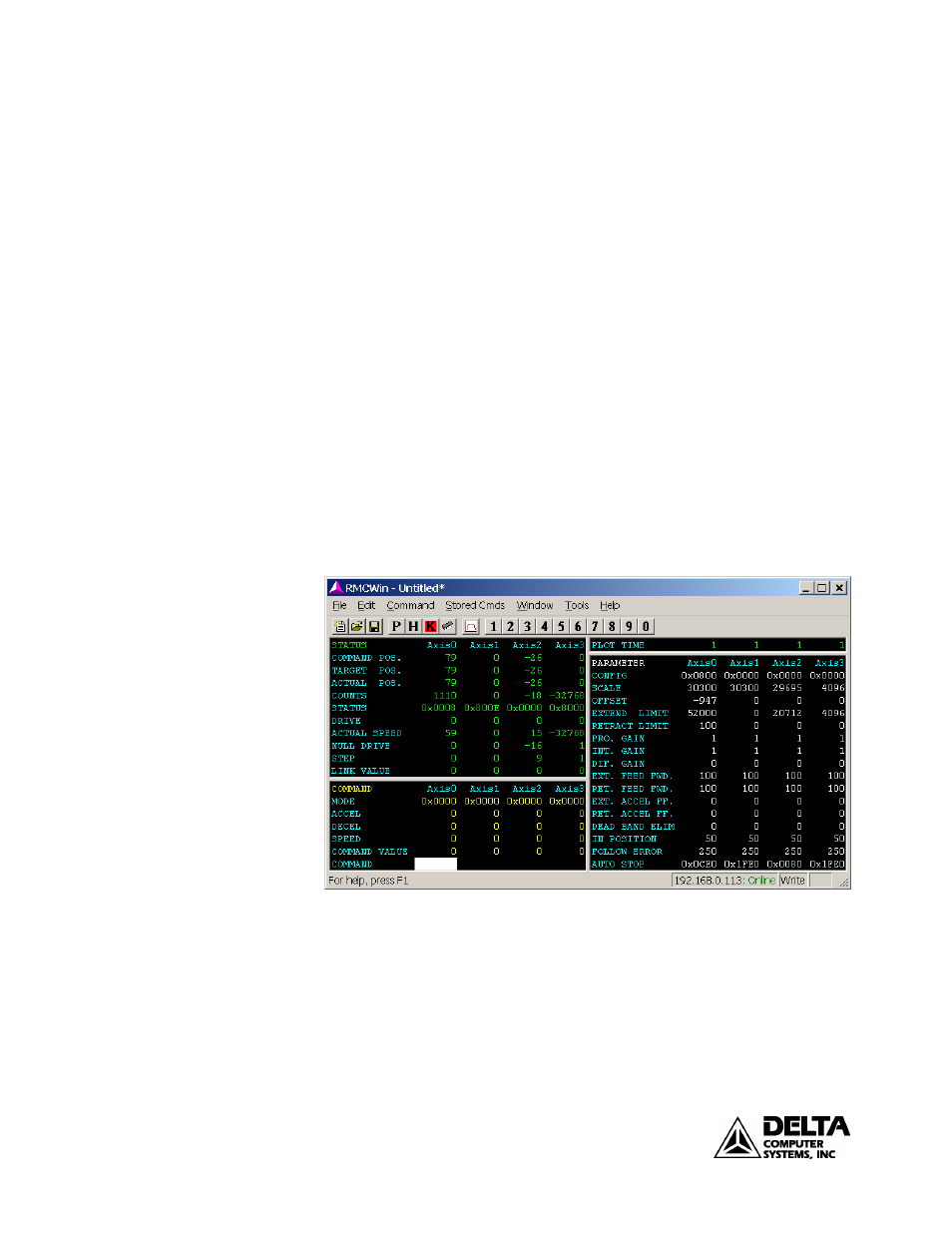
The main RMCWin window looks now like this:
6. Tuning position.
Now the system is set up and ready to tune for position. The procedure in
Tuning a Position Axis is followed:
• Issue Open Loop (O) commands with small positive and negative drives to
see if the cylinder goes in the right direction.
• If the cylinder moves in the wrong direction, the wiring to the drive may be
swapped, or Reverse Drive mode can be selected in the Config word.