Rockwell Automation Liqui-Flo DBT Reach Drive User Manual
Page 219
Application Notes
Appendix D-5
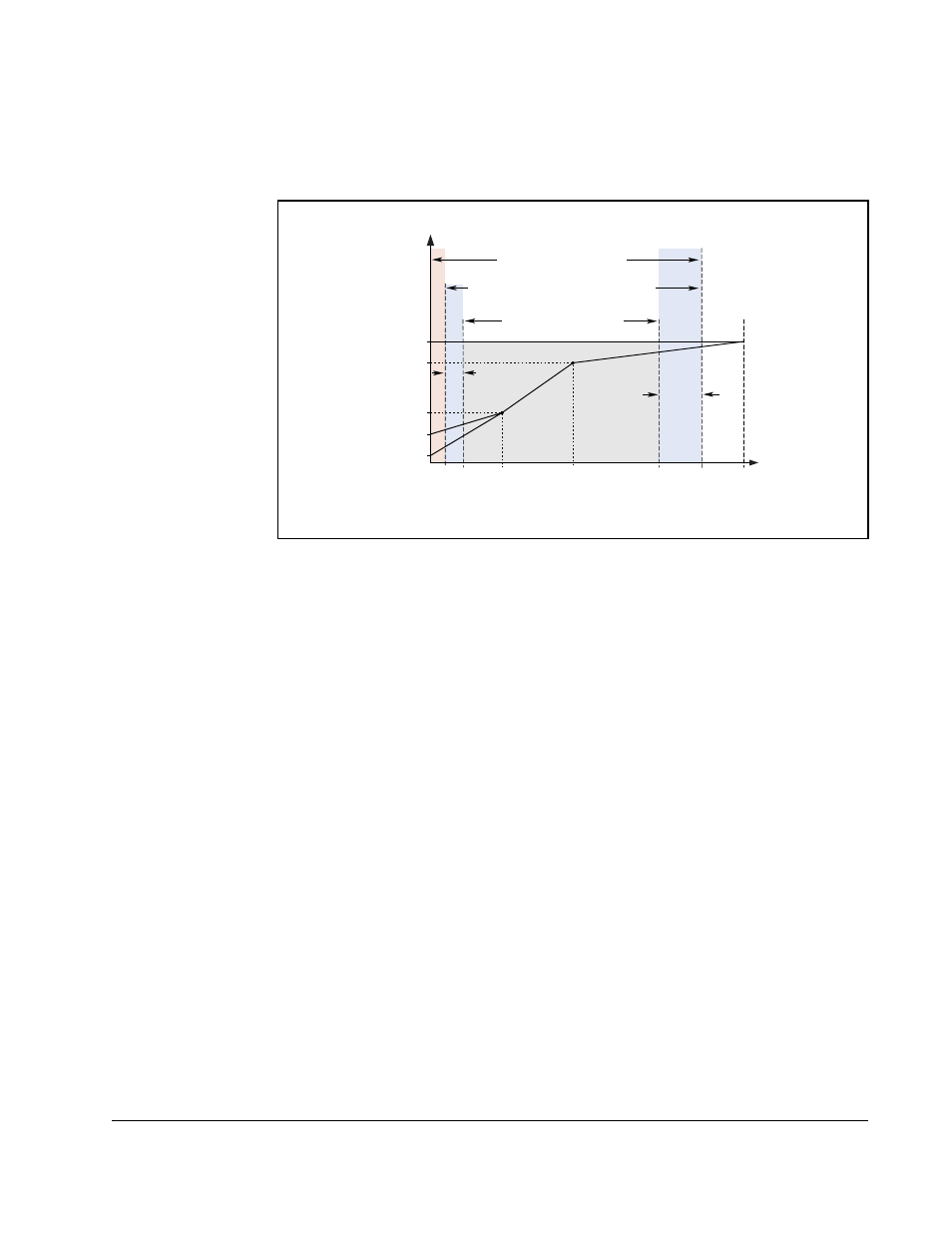
The Overspeed Limit is entered in Hertz and added to Maximum Speed and the sum
of the two (Speed Limit) limit the output frequency. This sum (Speed Limit) must is
compared to Maximum Frequency and an alarm is initiated which prevents operation if
the Speed Limit exceeds Maximum Frequency.
Power Loss Ride Through
When AC input power is lost, energy is being supplied to the motor from the DC bus
capacitors. The energy from the capacitors is not being replaced (via the AC line),
thus, the DC bus voltage will fall rapidly. The drive must detect this fall and react
according to the way it is programmed. Two parameters display DC bus voltage:
•
DC Bus Voltage (12) - displays the instantaneous value
•
DC Bus Memory (13) - displays a 6 minute running average of the voltage.
All drive reactions to power loss are based on DC Bus Memory (13). This averages
low and high line conditions and sets the drive to react to the average rather than
assumed values. For example, a 480V installation would have a 480V AC line and
produce a nominal 648V DC bus. If the drive were to react to a fixed voltage for line
loss detect, (i.e. 533V DC), then normal operation would occur for nominal line
installations. However, if a lower nominal line voltage of 440V AC was used, then
nominal DC bus voltage would be only 594V DC. If the drive were to react to the fixed
533V level (only –10%) for line loss detect, any anomaly might trigger a false line loss
detection. Line loss, therefore always uses the 6 minute average for DC bus voltage
and detects line loss based on a fixed percentage of that memory. In the same
example, the average would be 594V DC instead of 650V DC and the fixed
percentage, 27% for “Coast to Stop” and 18% for all others, would allow identical
operation regardless of line voltage.
Figure D.5 – Overspeed Limit
Frequency
Output V
olta
g
e
Note 1: The lower limit on this range can be 0 depending on the value of Speed Adder
Overspeed
Limit
Frequency Trim
due to Speed
Control Mode
Maximum
Voltage
Motor NP
Voltage
Run
Boost
Break
Voltage
Start
Boost
Allowable Output Frequency Range - Normal Operation
1
Allowable Speed Reference Range
Allowable Output Frequency Range -
Bus Regulation or Current Limit
Maximum
Frequency
Motor NP Hz
0
Break
Frequency
Maximum
Speed
Minimum
Speed
Output
Frequency
Limit