Rockwell Automation 2098-DSD-xxx Ultra3000 Digital Servo Drives with DeviceNet User Manual
Page 91
Publication 2098-RM001C-EN-P – August 2002
Programming Reference
2-75
151
153
155
157
159
161
163
165
167
169
171
173
175
177
179
181
183
185
187
189
Get
Fault Time 1
through
Fault Time 20
UDINT
4
10 *
Min
The time when the corresponding Fault History value
occurred. The time is based on an internal service
clock that runs only when the drive is powered.
190
Get
Motor Parameter
Source
BYTE
1
Indicates where the drive retrieves the motor
parameter values.
Bit 0 = Nonvolatile Memory
Bit 1 = Smart Encoder
Bit 2 = Motor File
191
Set
Auto Motor
Identification
USINT
1
Specifies if the drive should read the motor
parameters from an intelligent motor encoder or
from NVRAM.
0 - Enable - read parameters from encoder (default)
1 - Disable - read parameters from NVRAM
Note: Set is not allowed if the drive is enabled.
192
Set
Motor Model
SHORT_
STRING
1 byte
length
indicator, 1
byte per
character
The model name of the motor, up to 32 characters
long. The drive does not use the name Motor Model,
other than as a user interface display.
Note: Set is not allowed if the drive is enabled.
193
Set
Self-Sensing
Current
USINT
1
%
The current the drive will command when performing
self-sensing startup. The value is a percentage of
the lesser of the intermittent (peak) drive current
rating and the intermittent (peak) motor current
rating. The self-sensing current is normally set to 16,
but may need to be increased in the presence of
large inertias or high friction. In these systems,
higher settings will ensure that the self-sensing
startup algorithm will be able to complete.
Range: 1 to 100
Default: 16
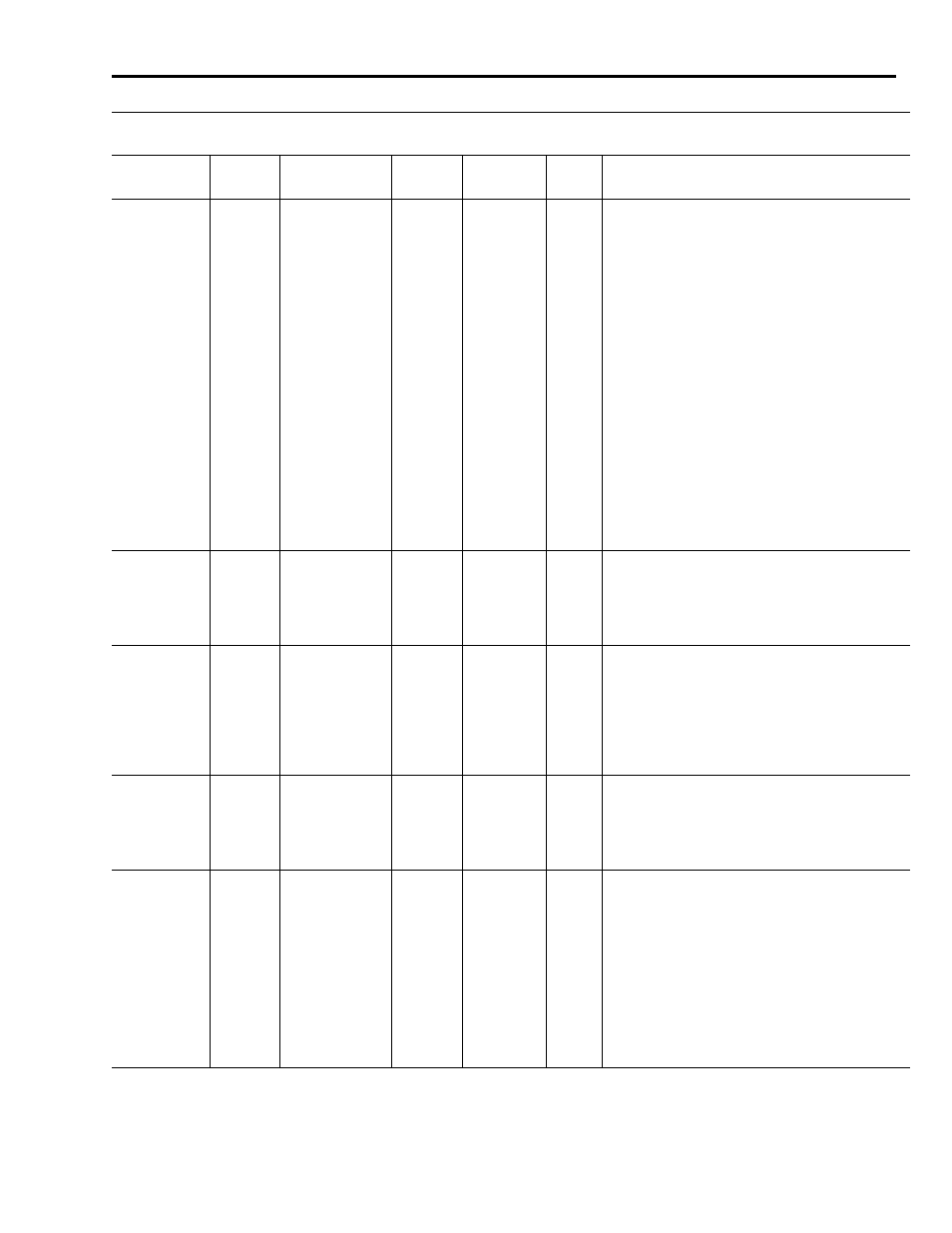
Parameter Object,
Instances ID = 1- 996
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data Size
(Bytes)
Units /
Scale
Description