Velocity loop p_gain, Velocity loop i_gain, Velocity loop d_gain – Rockwell Automation 2098-DSD-xxx Ultra3000 Digital Servo Drives with DeviceNet User Manual
Page 76: Position loop kp gain, Position loop ki gain, Position loop kd gain, Position loop kff gain
Publication 2098-RM001C-EN-P – August 2002
2-60
Programming Reference
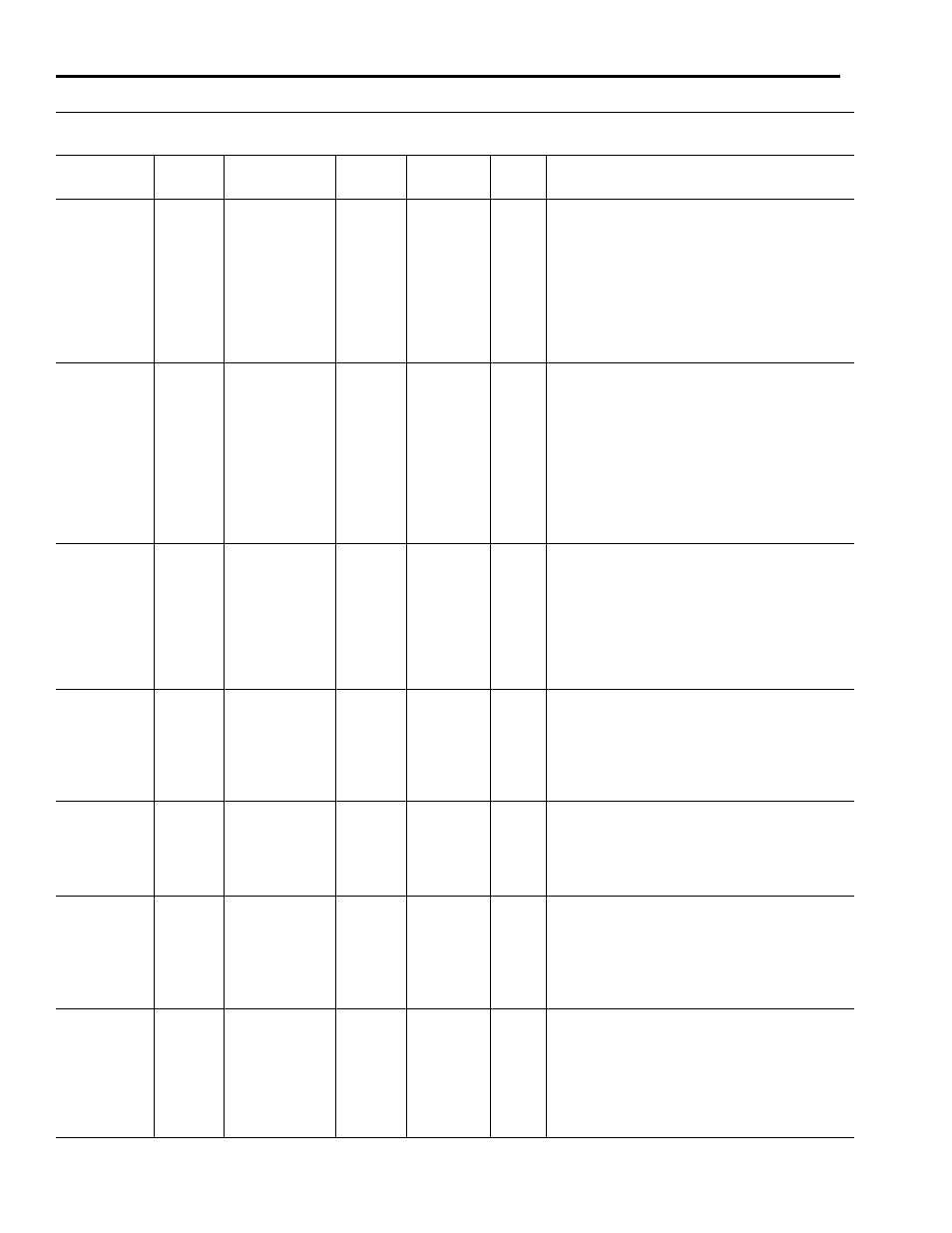
53
Set
Velocity Loop
P_Gain
UINT
2
The proportional gain for the velocity loop. The P
gain generates a control signal proportional to the
velocity error. Increasing the P gain improves
response time and increases the stiffness of the
system. Too high a P gain value causes instability;
too low a P gain value results in loose or sloppy
system dynamics.
Range: 0 to 4000
Default: 200
54
Set
Velocity Loop
I_Gain
UINT
2
Integral gain for the velocity loop. The I gain
generates a control signal proportional to the
integral of the velocity error. I gain improves the
steady-state velocity performance of the system.
Increasing the integral gain generally increases the
ultimate positioning accuracy of the system.
However excessive integral gain results in system
instability.
Range: 0 to 4000
Default: 66
55
Set
Velocity Loop
D_Gain
INT
2
Derivative gain value for the velocity loop. The D
gain generates a control signal proportional to
measured acceleration. Positive D gain reduces
velocity overshoot, and negative D gain should be
used only in systems that exhibit mechanical
resonance.
Range: -1000 to 1000
Default: 0
56
Set
Position Loop Kp
Gain
UINT
2
1/128
Proportional gain for the position loop. The Kp gain
generates a control signal proportional to the
position error. Kp gain changes the position loop
bandwidth and the settling time of the position loop.
Range: 0 to 4095
Default: 512
57
Set
Position Loop Ki
Gain
UINT
2
1/128
Integral gain for the position loop. Ki gain generates
a control signal proportional to the integral of the
velocity error.
Range: 0 to 4095
Default: 0
58
Set
Position Loop Kd
Gain
UINT
2
1/128
Derivative gain for the position loop. The Kd gain
generates a control signal proportional to measured
velocity. Kd provides damping to the position loop,
which can reduce overshoot.
Range: 0 to 4095
Default: 0
59
Set
Position Loop Kff
Gain
UINT
2
Feedforward gain for the position loop. The Kff gain
generates a feed forward signal proportional to the
commanded speed. Kff gain reduces position
following error. However high values can cause
position overshoot.
Range: 0 to 200
Default: 100
Parameter Object,
Instances ID = 1- 996
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data Size
(Bytes)
Units /
Scale
Description