Position loop ki zone, Low pass filter, Low pass bandwidth – Rockwell Automation 2098-DSD-xxx Ultra3000 Digital Servo Drives with DeviceNet User Manual
Page 77
Publication 2098-RM001C-EN-P – August 2002
Programming Reference
2-61
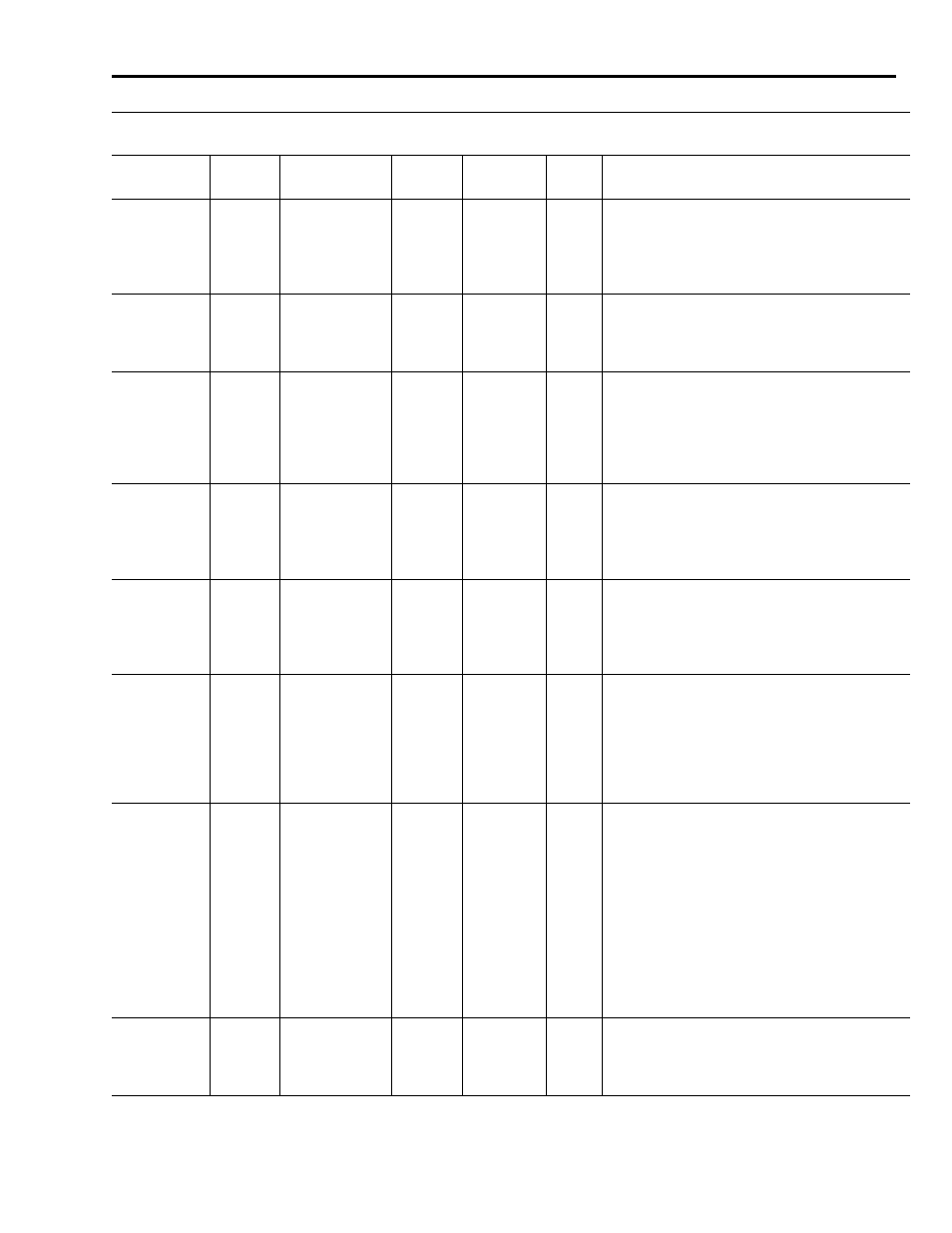
60
Set
Position Loop Ki
Zone
UDINT
4
Cnts
The region around the commanded position where
integral gain is active. If the position error is greater
than Ki Zone, the integrator is not active.
Range: 0 to 0x7fffffff
Default: 1000
61
Set
Low Pass Filter
USINT
1
Selects whether to enable or disable the drive's low
pass filter.
0 - Disable
1 - Enable (default)
62
Set
Low Pass
Bandwidth
UINT
2
Hz
The bandwidth of the low pass filter. This value
indicates the cutoff frequency of the low pass filter.
The filter reduces noise generated by encoder
resolution or mechanical resonance in the system.
Range: 1 to 992
Default: 150
63
Set
Start Autotune
Command
USINT
1
Starts autotuning if the drive is enabled and
Parameter 28, Host Control Mode is set to 4 -
Autotuning.
0 - No Action (default)
1 - Execute Command
64
Set
Tuning Direction
USINT
1
Select the direction in which the motor rotates
during autotuning.
0 - Bi-Directional (default)
1 - Forward Only
2 - Reverse Only
65
Set
Autotune
Maximum
Distance
UDINT
4
Cnts
The maximum distance the motor will turn when
performing autotuning. The autotune distance
should be set as large as the application permits, so
that the autotune algorithm is able to collect
sufficient data to compute new tuning gains.
Range: 1 to 0x7fffffff
Default: 1000000
66
Set
Autotune Step
Current
USINT
1
%
The current the drive will command when performing
autotuning. The value is a percentage of the lesser
of the intermittent (peak) drive current rating and
intermittent (peak) motor current rating. The
autotune current is normally set to 10%, but may
need to be increased in the presence of large
inertias or high friction. In these systems, higher
settings ensure that the autotune algorithm is able
to collect sufficient data to compute new tuning
gains.
Range: 1 to 100
Default: 10
67
Set
Tune Position
Step
UINT
2
Cnts
The amplitude of the drive's commanded position
step (square wave) during manual position tuning.
Range: 1 to 32767
Default: 500
Parameter Object,
Instances ID = 1- 996
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data Size
(Bytes)
Units /
Scale
Description