Override analog output, Analog output override, User current fault – Rockwell Automation 2098-DSD-xxx Ultra3000 Digital Servo Drives with DeviceNet User Manual
Page 83: User velocity limit, User velocity fault, Velocity error limit, Velocity error time, Position error limit
Publication 2098-RM001C-EN-P – August 2002
Programming Reference
2-67
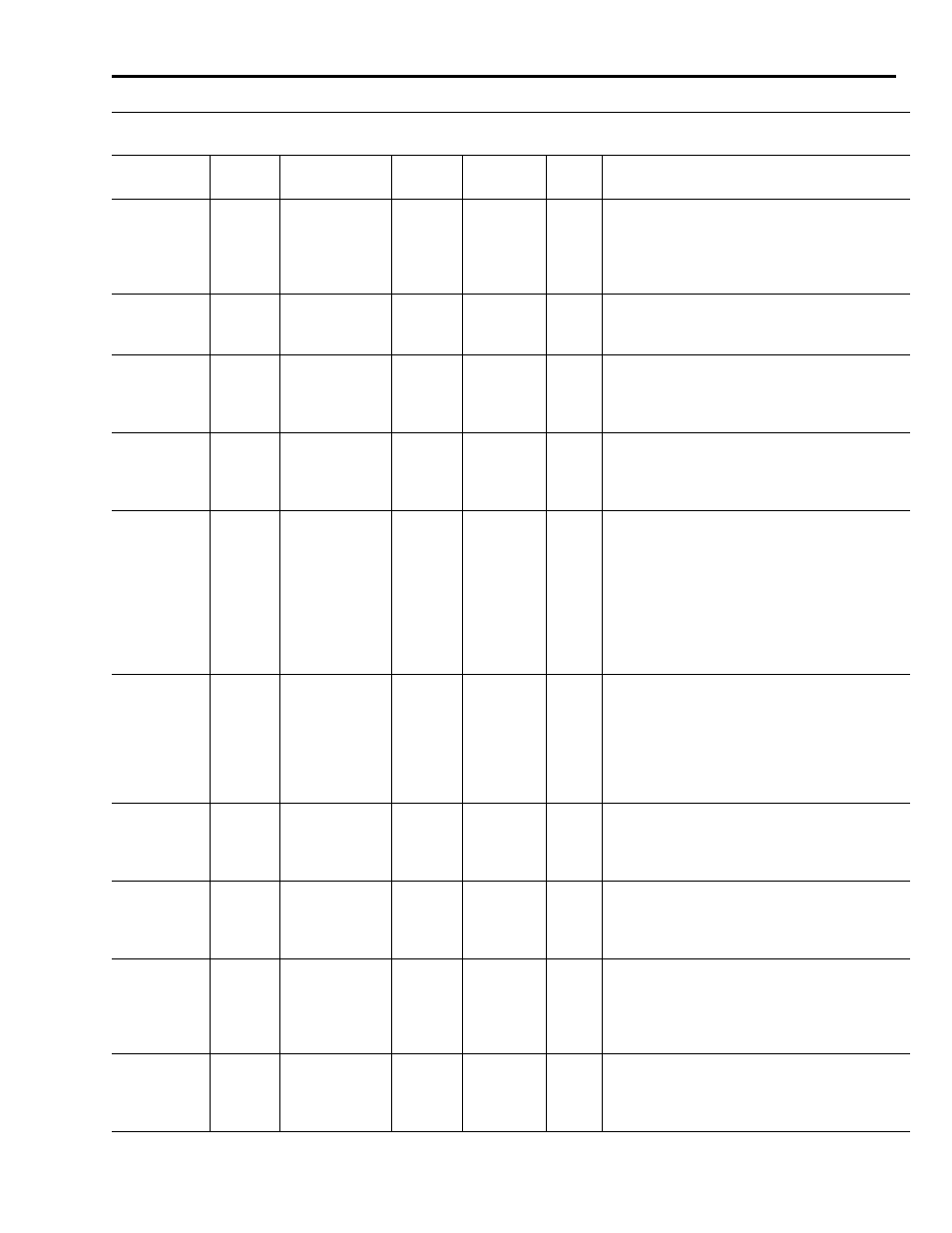
99
Set
Analog Output
Scale
INT
2
The analog output scale in units per volt. The units is
dependent on the signal selected by the Parameter
98 - Analog Output Configuration.
Range: -32767 to 32767
Default: 0
100
Set
Analog Output
Offset
INT
2
mV
The offset applied to the analog output.
Range: -10000 to 10000
Default: 0
101
Set
Override Analog
Output
USINT
1
The analog output override control flag determines if
you can write to the analog output directly.
0 - Normal (default)
1 - Override
102
Set
Analog Output
Override
INT
2
mV
Sets the analog output value when Parameter 101,
Override Analog Output is set to 1 - Override.
Range: -10000 to 10000
Default: 0
103
Set
User Current
Fault
UINT
2
Amps /
128
The current level that will generate a fault when
exceeded by the average current. The drive
automatically protects itself and the motor when the
average current exceeds the drive or motor current
ratings, and this protection cannot be disabled.
However, you can specify a lower current fault level
with this parameter.
Range: 0 to 32767
Default: 32640
104
Set
User Velocity
Limit
UDINT
4
Cnts /
Sec
The minimum velocity that will generate a User
Velocity fault. The drive automatically protects the
motor from exceeding its ratings, and this protection
cannot be disabled. However, you can specify a
lower velocity fault level with this parameter.
Range: 0 to 0x7fffffff
Default: 100000
105
Set
User Velocity
Fault
USINT
1
Determines if the User Velocity fault detection is
enabled (turned on) or disabled.
0 - Disable (default)
1 - Enable
106
Set
Velocity Error
Limit
USINT
1
% of
max
motor
speed
The minimum velocity error which triggers the
Velocity Error fault.
Range: 1 to 100
Default: 25
107
Set
Velocity Error
Time
UINT
2
mSec
The minimum time which the velocity error must be
greater than the Velocity Error Limit to cause a
Velocity Error Fault.
Range: 0 to 65535
Default: 1000
108
Set
Position Error
Limit
UDINT
4
Cnts
The minimum position error which triggers the
Following Error fault.
Range: 0 to 0x7fffffff
Default: 8000
Parameter Object,
Instances ID = 1- 996
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data Size
(Bytes)
Units /
Scale
Description