Rockwell Automation 1771-PD PID MODULE (+DU) User Manual
Page 93
Programming
Chapter 3
3Ć50
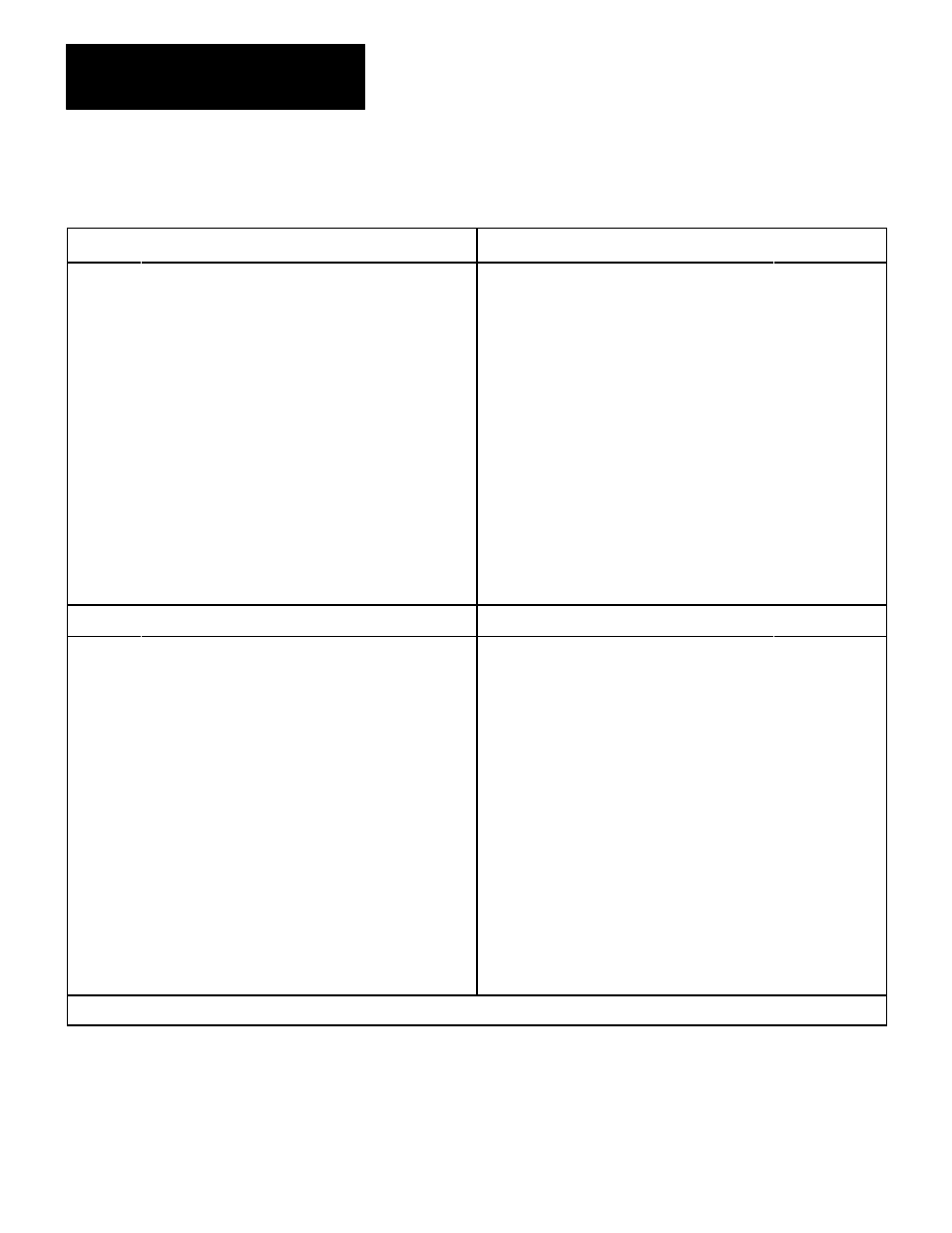
Table 3.J
Word Summary
DYNAMIC BLOCK
STATUS BLOCK
W01
W02
W03
W04
W05
W06
W07
W09
W09
W10
W11
W12
W13
W14
W15
W16
W17
Master Control Word
Control Word
Dynamic Block Start
Address
Loop 1 Block Start Address
Set Analog Output 1
Set Point 1
Proportional Gain 1
Bias 1
Set Process Variable 1
Set Feedforward Input 1
Loop 2 Block Start Address
Set Analog Output 2
Set Point 2
Proportional Gain 2
Bias 2
Set Process Variable 2
Set Feedforward Input 2
SET OUT1
SP1
K
P
1
BIAS 1
SET PV1
SET EFFI1
SET OUT 2
SP2
K
P
2
BIAS 2
SET PV2
SET FFI2
W57
W58
W59
W60
W61
W62
W63
W64
W65
W66
W67
W68
W69
W70
W71
W72
W73
W74
For Future Use
Alarm (both loops)
Next Block Start Address
Loop Time/Diagnostic
Loop 1 Status
Loop 1 Error
Read Loop 1 Output
Read Analog Input 1
Read Process Variable 1
Read Tieback Input 1
Read Feedforward Value 1
Loop 2 Status
Loop 2 Error
Read Loop 2 Output
Read Analog Input 2
Read Process Variable 2
Read Tieback Input 2
Read Feedforward Value 2
ERROR1
READ V1
READ IN1
READ PV1
READ TIE1
READ FFV1
ERROR2
READ V2
READ IN2
READ PV2
READ TIE2
READ FFV2
LOOP 1 BLOCK
LOOP 2 BLOCK
W18
W19
W20
W21
W22
W23
W24
W25
W26
W27
W28
W29
W30
W31
W32
W33
W34
W35
W36
Loop 1 Control Word A
Loop 1 Control Word B
Input Filter Time Constant 1
Maximum Negative Error 1
Maximum Positive Error 1
Dead Band 1
Integral Gain 1
Derivative Gain 1
Integral Term Limit 1
Derivative Term Limit 1
Minimum Output Limit 1
Maximum Output Limit 1
Loop 1 Expanded Control
Word
Minimum Scaling Value 1
Maximum Scaling Value 1
Feedforward Offset 1
Feedforward Gain 1
Lead Time Constant 1
Lag Time Constant 1
TA1
EMN1
EMP1
DB1
K
I
1
K
D
1
V
1
MAX1
V
D
MAX1
VMIN1
VMAX1
SMIN1
SMAX1
FFO1
K
F
1
TB1
TC1
W38
W39
W40
W41
W42
W43
W44
W45
W46
W47
W48
W49
W50
W51
W52
W53
W54
W55
W56
Loop 2 Control Word A
Loop 2 Control Word B
Input Filter Time Constant 2
Maximum Negative Error 2
Maximum Positive Error 2
Dead Ban 2
Integral Gain 2
Derivative Gain 2
Integral Term Limit 2
Derivative Term Limit 2
Minimum Output Limit 2
Maximum Output Limit 2
Loop 2 Expanded Control
Word
Minimum Scaling Value 2
Maximum Scaling Value 2
Feedforward Offset 2
Feedforward Gain 2
Lead Time Constant 2
Lag Time Constant 2
TA2
EMN2
EMP2
DB2
K
I
2
K
D
2
V
I
MAX2
V
D
MAX2
VMIN2
VMAX2
SMIN2
SMAX2
FFO2
K
F
2
TB2
TC2
Note: If you change a loop 1 or loop 2 parameter, you must initiate a load/entry sequence.