Programming chapter 3 – Rockwell Automation 1771-PD PID MODULE (+DU) User Manual
Page 67
Programming
Chapter 3
3Ć24
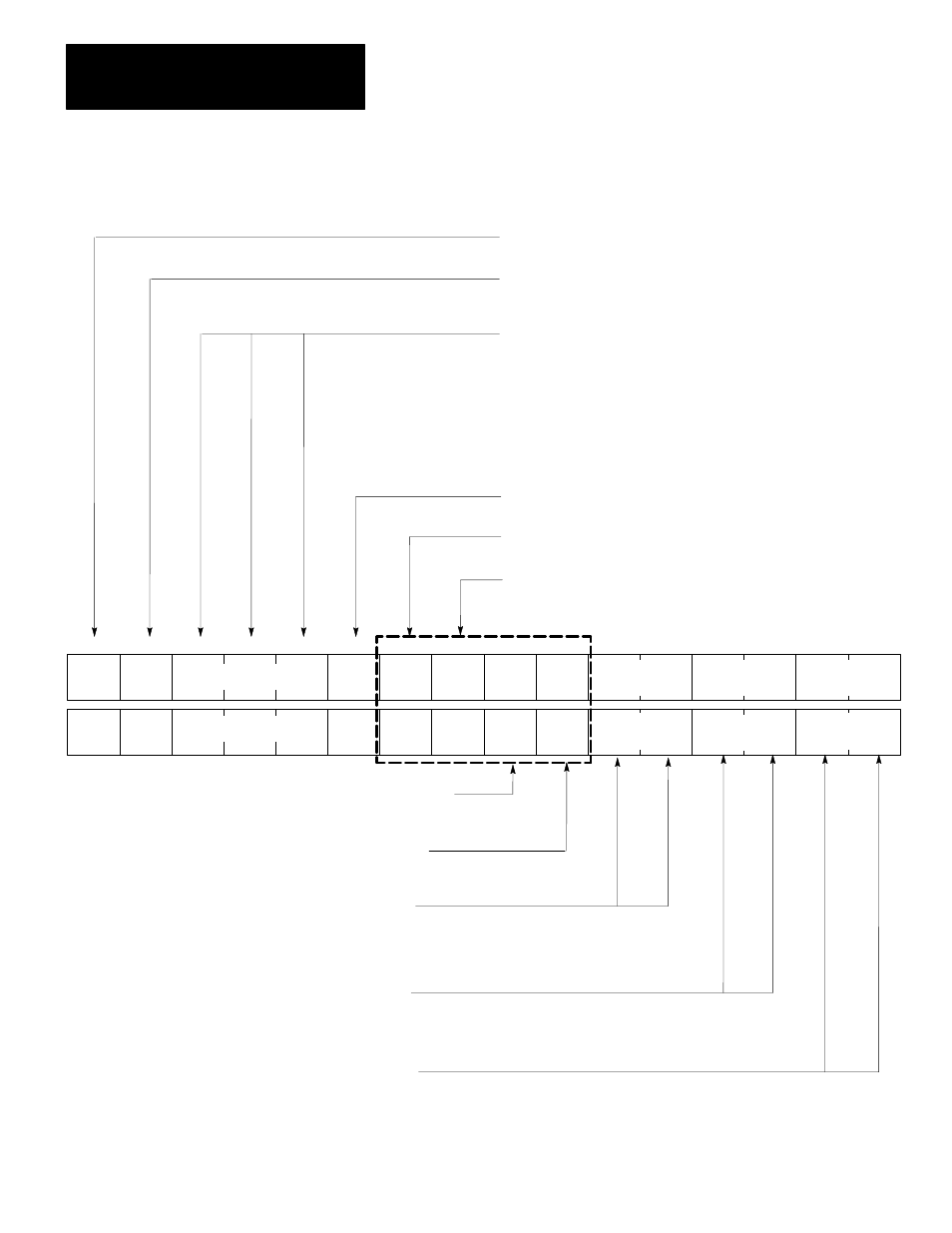
Figure 3.7
Control Word B, Loop 1 W19 and Loop 2 W39
Loop 1
1
0
17
16
15
14
13
12
11
10
07
06
05
04
03
02
01
00
1
0
W19
Loop 2
W39
Note: If you change a loop 1 or loop 2
parameter, you must initiate a load/enter sequence
Expanded Loop
MULT (X)
BIAS 1
SUM (+)
MULT (X)
BIAS 2
SUM (+)
LIMIT
OUTPUT1
LIMIT
OUTPUT2
SOFT FAULT
SELECTION CODE
SOFT FAULT
SELECTION CODE
x10
TA1
x1
x10
TA2
x1
x10
TB1
x1
x10
TB2
x1
x10
TC1
x1
x10
TC2
x1
(-)
SP SIGN
(+)
(-)
SP SIGN
(+)
x10
SCALING
x1
x10
SCALING
x1
MULTIPLIER
FOR
K p
MULTIPLIER
FOR
K 1
i
MULTIPLIER
FOR
K D
MULTIPLIER
FOR
K p
MULTIPLIER
FOR
K 1
i
MULTIPLIER
FOR
K D
W19(W39) B07
1=Negative scaled set point value
0=Positive scaled set point value
W19(W39) B06
1=Scaling values W31, W32,
(W51, W52) times 10 (x10)
0=No multiplier (x1)
W19(W39) B05,04
Multiplier for K
P
W07(W14)
0 0 K
P
x1
0 1 K
P
/10
1 0 K
P
x10
1 1 K
P
x100
W19(W39) B03,02
Multiplier for K
I
W24(W44)
0 0 K
I
x1
0 1 K
I
/10
1 0 K
I
x10
1 1 K
I
x100
W19(W39) B01,00
Multiplier for K
D
W25(W45)
0 0 K
D
x1
0 1 K
D
/10
1 0 K
D
x10
1 1 K
D
x100
W19(W39) B17
1=Multiply V
PID
x BIAS
0=Add V
PID
+ BIAS
W19(W39) B16
1=Use output limiting W28, W29,
(W48,W49)
0=No limiting
W19(W39) B15,14,13
SOFT FAULT MODE SELECTION
0 0 0 Output set to minimum value
0 0 1 Output holds last value
0 1 0 Output will hold Set Analog
Output value if W01 B01=1.
If W01 B01=0, module continues
to perform closed loop control
1 0 0 PID module will perform closed
loop control (ignores set output)
1 1 1 Output set to maximum value
W19(W30) B12
1=TA W20(W40) times 10 (x10)
0=No multiplier (x1)
W19(W39) B11
1=TB W35(W55) times 10 (x10)
0=No multiplier (x1)
W19(W39) B10
1=TC W36(W56) times 10 (x10)
0=No multiplier (x1)
11110
1
1
1
1