Programming chapter 3 – Rockwell Automation 1771-PD PID MODULE (+DU) User Manual
Page 63
Programming
Chapter 3
3Ć20
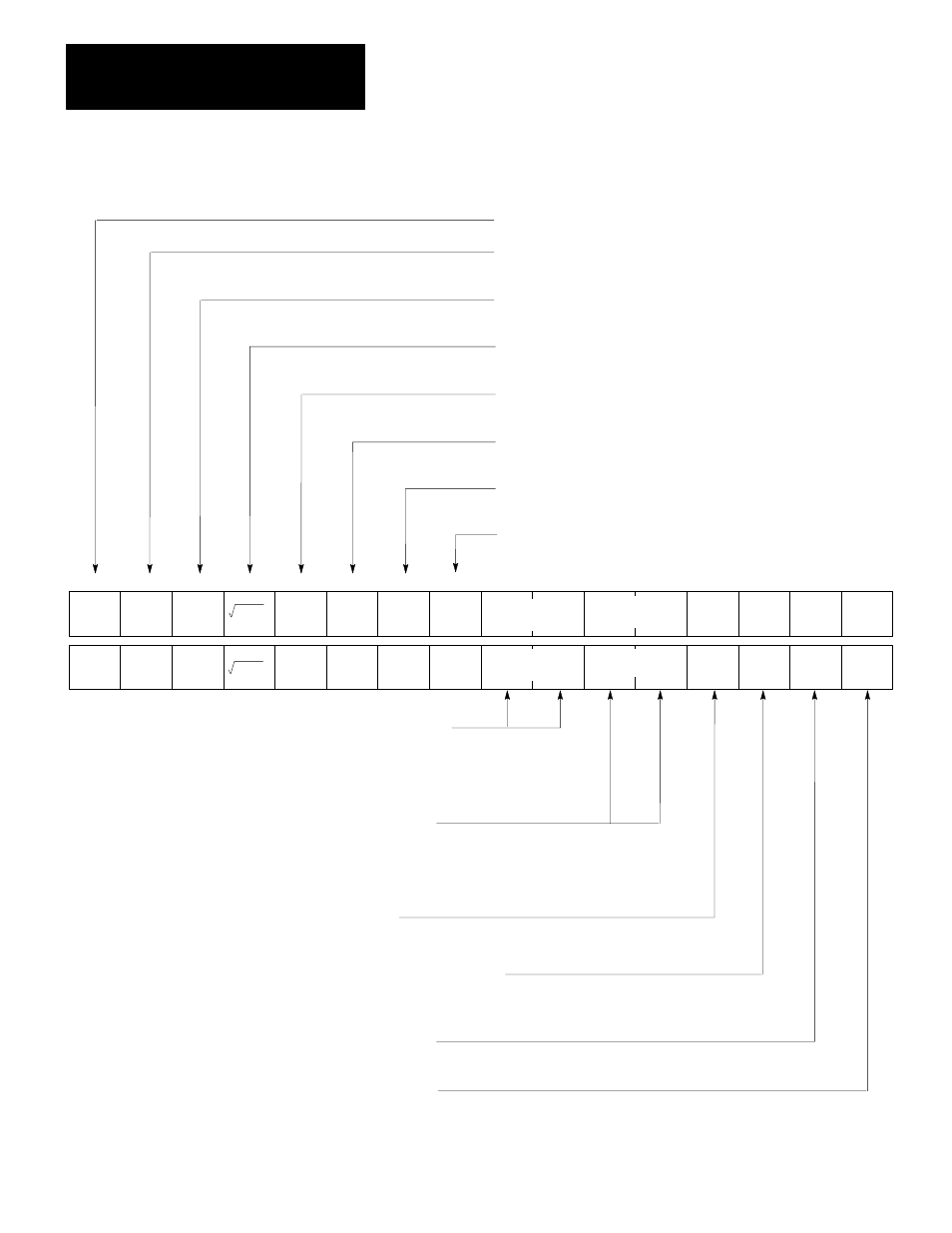
Figure 3.6
Control Word A, Loop 1 W18 and Loop 2 W38
Loop 1
1
0
0
1
PC
LIMIT
PV
VD MAX
LIMIT
HOLD
PID1
HOLD
BIAS1
17
16
15
14
13
12
11
10
07
06
05
04
03
02
01
00
1
0
1
0
W18
Loop 2
W38
PV1
PID
PC
PV2
PID
PV1
PV2
PV-SP
ERROR1
SP-PV
PV-SP
ERROR2
SP-PV
ERROR1
LIMIT
ERROR2
DEAD BAND
DEAD BAND
V1 MAX
LIMIT
V1 MAX
LIMIT
PROPORTIONAL
ERROR
FUNCTION
PROPORTIONAL
ERROR
FUNCTION
INTEGRAL
ERROR
FUNCTION
INTEGRAL
ERROR
FUNCTION
DERIV. ERR.
Error
PV
DERIV. ERR.
Error
VD MAX
LIMIT
HOLD
PID2
HOLD
BIAS2
Note: If you change a loop 1 or loop 2
parameter, you must initiate a load/enter sequence
W18(W38) B07,06
Proportional Error Function, E
P
0 0=Error
0 1=2/3 (Error) + 1/3 (Error)
2
1 0=1/3 (Error) + 2/3 (Error)
2
1 1= (Error)
2
W18(W38) B05,04
Integral Error Function, E
I
0 0=Error
0 1=2/3 (Error) + 1/3 (Error)
2
1 0=1/3 (Error) + 2/3 (Error)
2
1 1= (Error)
2
W18(W38) B03
Derivative Error, E
D
1=PV
0=Error
W18(W38) B02
1=Use derivative term limiting W27(W47)
0=No
limiting
W18(W38) B01
1=Hold last V
PID
value
0=Normal V
PID
calculations
W18(W38) B00
1=Hold last BIAS value
0=Normal BIAS calculations
W18 B17
Must be set to 0: W38 B17 must be set to 1
W18 B16
Must be set to 1: W38 B16 must be set to 0
W18(W38) B15
1=PV from PC Processor W09(W16)
0=PV from hardware analog input
W18(W36) B14
1=Perform square root of PV
0=No square root
W18(W38) B13
1=Error=(PVĆSP) reverse acting
0=Error=(SPĆPV) direct acting
W18(W38) B12
1=Use error limiting W21, W22 (W41, W42)
0=No limiting
W18(W38) B11
1=Use error dead band W23 (W43)
0=No dead band
W18(W38) B10
1=Use integral term limiting W26 (W46)
0=No limiting
11109