Rockwell Automation 1771-QA Stepper Positioning Assembly User Manual User Manual
Page 28
3–6
Programming and Operation
Publication 1771-UM002A–EN–P – May 2000
A done bit is set for each axis at completion of each positioning
profile. If all axes (up to three) are not synchronized, then the
control of any axis is completely independent of the other(s). Three
different single-axis machines could be controlled by one stepper
controller module and three pulse output expander modules in one
I/O chassis.
Independent Mode
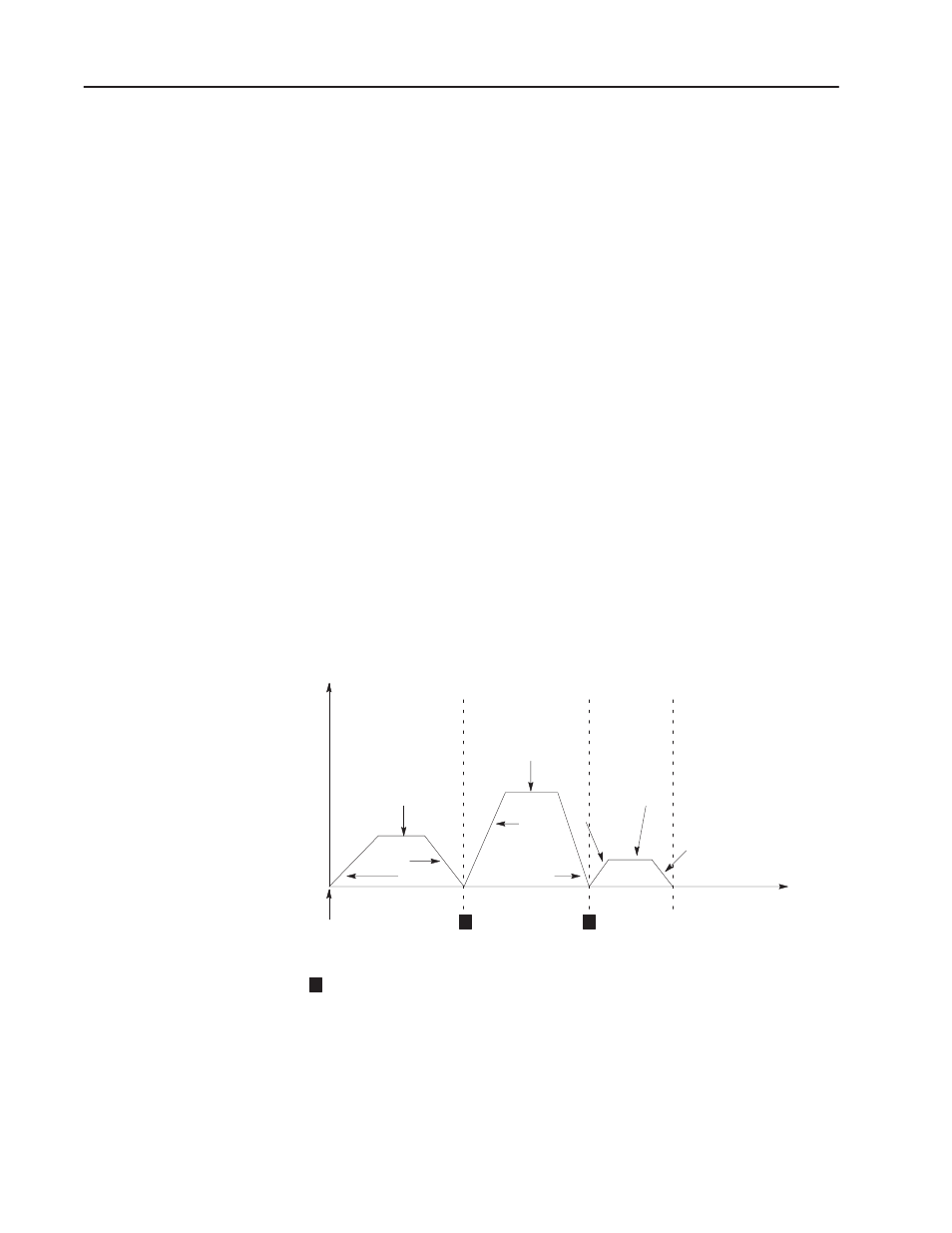
The independent mode allows a chain of single-step moves to be
sequentially executed. Each move is defined as having a ramp, final
rate, decel (to 0Hz rate) and a final position. Typically there is a
pause of 10-30ms from the end of one move to the beginning of the
next (dwell at 0Hz rate). Refer to Figure 3.4. One start command is
required for the entire positioning profile. A done bit is set at the
completion of each move.
Important:
Done bits which are set between moves in the
independent mode should not be used because they
remain set for too short a time. Only the done bit of the
last move should be examined. This can be achieved by
examining the number that identifies the last move
(status bit 10-13) and the done bit in the same rung.
Figure 3.4
Independent Mode
Position
Ramp
Decel
Decel
Ramp
Ramp
Decel
Final
Rate
Final
Rate
Final
Rate
Start
Command
Move 1
Move 2
Move 3
The done bit remains set until the start of the next move (10msec dwell time, nominal)
10517
Rate
1
Done Bit
is set
1
1