Rockwell Automation 1771-QA Stepper Positioning Assembly User Manual User Manual
Page 27
3–5
Programming and Operation
Publication 1771-UM002A–EN–P – May 2000
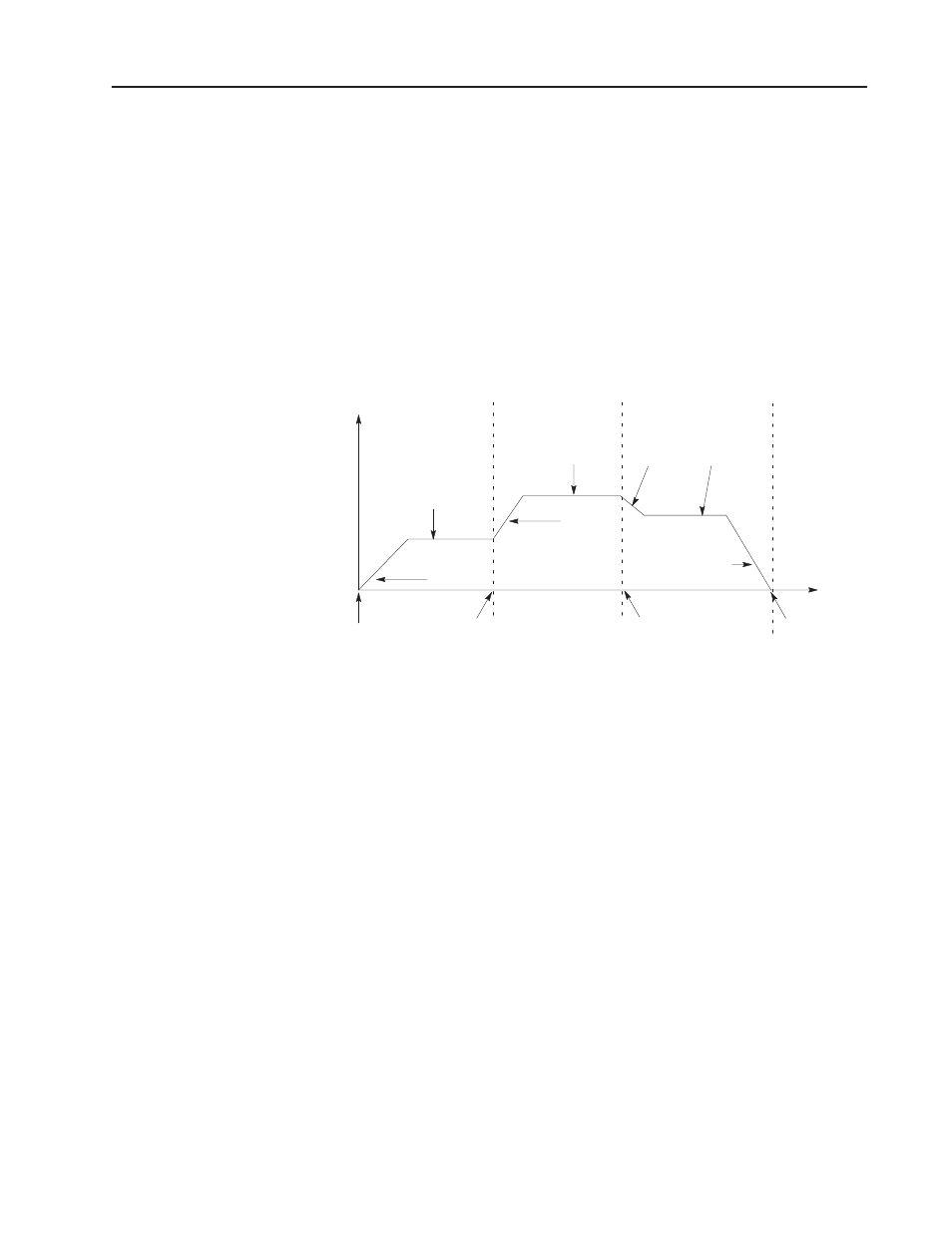
Continuous Mode
The continuous mode allows moves of the moveset to be blended
continuously into a move profile with fully programmed
accelerations and decelerations. One start command is required for
the entire positioning profile. A done bit is set at completion. Each
move is defined as having a ramp, a final rate and a final position.
The last move of the profile, in addition to the ramp, final rate and
final position, contains a deceleration to zero (Figure 3.3). The decel
value does not affect the positioning profile in any move except the
last move.
Figure 3.3
Continuous Mode
Position
Ramp 1
Ramp 2
Ramp 3
Decel 3
Final
Rate 1
Final
Rate 2
Final
Rate 3
Start
Command
Final
Position 1
Final
Position 2
Final
Position 3
Done Bit
is set
Move 1
Move 2
Move 3
10515
Rate
Synchronization of Axes
All axes (up to three) can be synchronized move-by-move in the
single-step and independent modes. Each axis must complete a
given move before any axis is allowed to begin the next move.
Coordination is independent of PC processor scan time. If two axes
are synchronized, then the third axis, if used, must also be
synchronized. Synchronized axes must operate in the same
positioning mode.
A start command can be programmed for only one of the
synchronized axes. In the single-step positioning mode, this must be
done for each move of the moveset. Start commands received during
a move will be ignored. Done bits for all axes must be set before a
start command is executed. In the continuous and independent
modes, one start command is required at the beginning of the
synchronized profiles.