The pid controller functional block – Echelon LonPoint Application and Plug-In User Manual
Page 86
9-2
PID Controller Functional Block
The PID Controller Functional Block
The PID Controller functional block controls an output network variable value
based on an input process variable and setpoint. The process variable is obtained
from a sensor that measures an environmental condition, such as temperature or
air pressure. The setpoint indicates the desired value of the process variable. The
PID controller reads these values and based on the PID algorithm, outputs a value
known as the controlled variable. This variable is used to drive an actuator that
effects the environmental condition which is read by the sensor that produces the
process variable.
For example, a PID functional block may be used to control the temperature of a
room. The process variable would be connected to a sensor that reads the current
temperature of the room, the setpoint would be determined manually through the
use of a dial or control panel, and the controlled variable would be connected to an
actuator that drives a VAV damper.
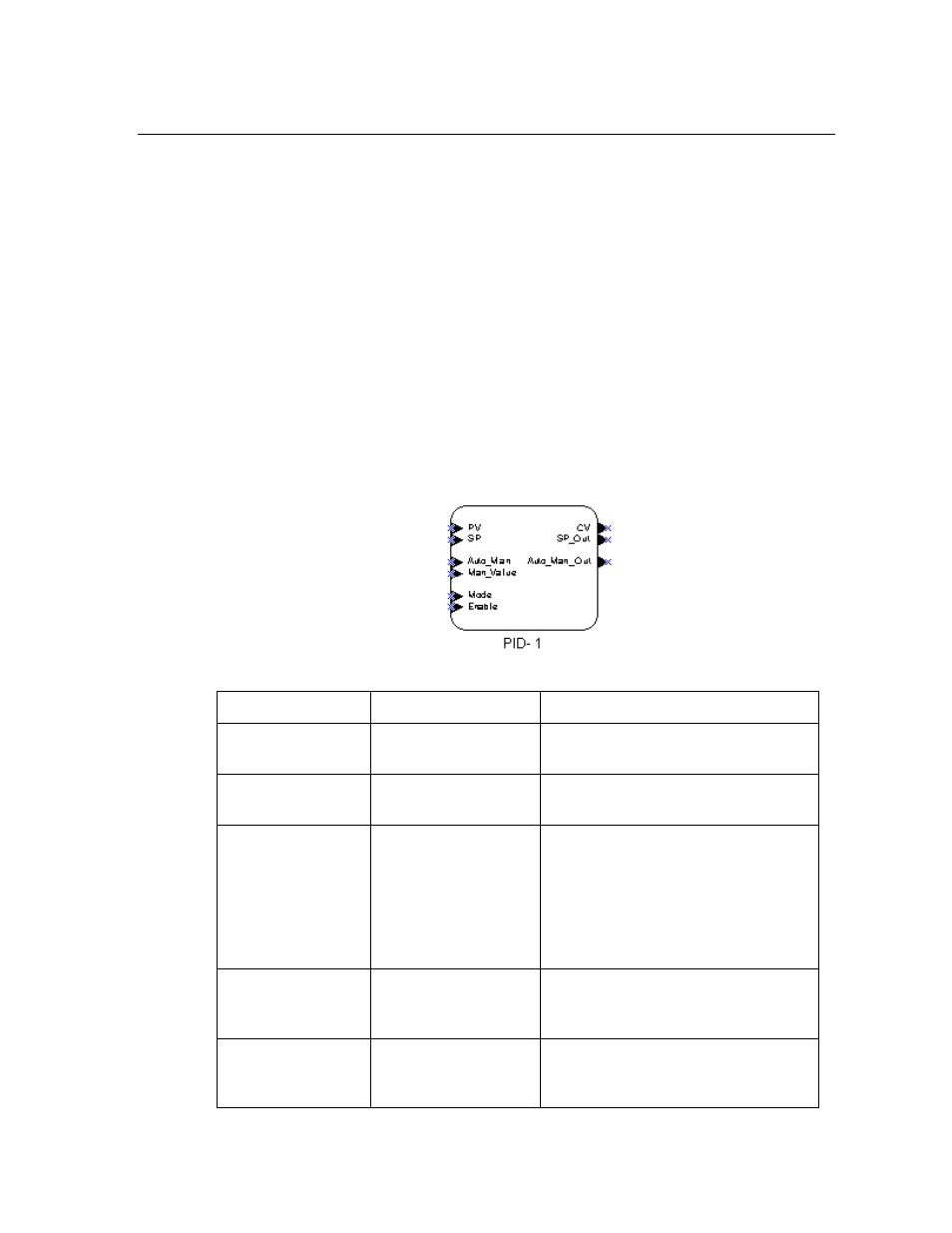
The following figure and tables summarize the inputs and outputs of the AFB
functional block:
Input Network Variables
Default name
Default type
Description
PV
SNVT_temp_f
(changeable)
The process variable network
variable.
SP
SNVT_temp_f
(changeable)
The setpoint network variable.
Auto_Man
SNVT_switch
The auto/manual network variable.
If this network variable is set to
On, the PID controller will be in
Auto. If this network variable is set
to Off, the PID controller will be in
manual. See the Presets tab for
more information.
Man_Value
SNVT_lev_cont_f
The manual value network
variable. See the Presets tab for
more information.
Mode
SNVT_hvac_mode
(changeable)
The mode network variable. See
the Presets tab for more
information.