Integrated safety configurations – Rockwell Automation 2198-Hxxx Kinetix 5500 Drive Systems Design Guide User Manual
Page 4
4
Rockwell Automation Publication GMC-RM009D-EN-P - June 2014
Kinetix 5500 Drive Systems
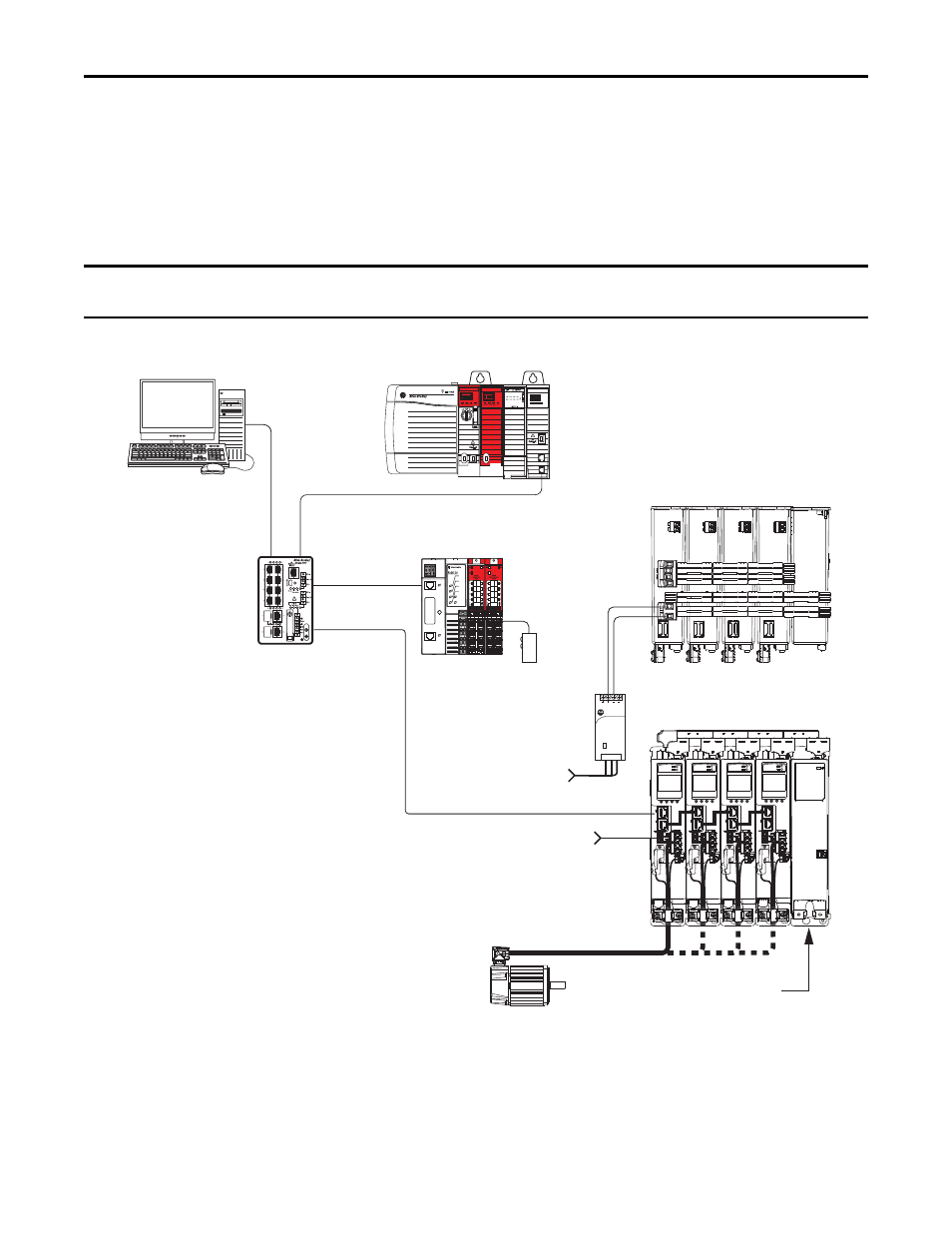
Integrated Safety Configurations
The 1756-L7
xS GuardLogix safety controller issues the safe torque-off (STO) command over the EtherNet/IP network
and the 2198-H
xxx-ERS2 drive executes the STO command.
In this example, a single GuardLogix safety controller makes Motion and Safety connections with the 2198-H
xxx-ERS2
drives.
Motion and Safety Configuration (single controller)
IMPORTANT
If only one controller is used in an application with Motion and Safety connections, it must be a 1756-L7
xS GuardLogix safety
controller.
1606-XL
Po we r S u p p l y
Input
Allen-Bradley
LNK1LNK2 NET OK
EtherNet/IP
1
2
1585J-M8CBJM-
x
Ethernet (shielded) Cable
GuardLogix 1756-L7
xS Safety Controller
Logix Designer
Application
(version 24.0 or later)
AC Input Power
2198-H
xxx-ERS2 Servo Drives
(top view)
2198-H
xxx-ERS2 Servo Drives
(front view)
Digital Inputs to Sensors and Control String
1606-XL
xxx
24V DC Control, Digital Inputs,
and Motor Brake Power
(customer-supplied)
Kinetix VP
Servo Motors
2198-CAPMOD-1300 Capacitor Module
(optional component)
1783-BMS
Stratix 5700
Switch
Module Definition
Configured with
Motion and Safety
Connection
1734-AENTR
POINT Guard I/O
EtherNet/IP Adapter
Safety
Device