H parameters, P.058, P.059 – Rockwell Automation GV3000/SE AC Drive ControlNet Network Communication Board, M/N 2CN3000 User Manual
Page 93: P.060, P.061, P.062, P.063, P.064, P.065, P.066
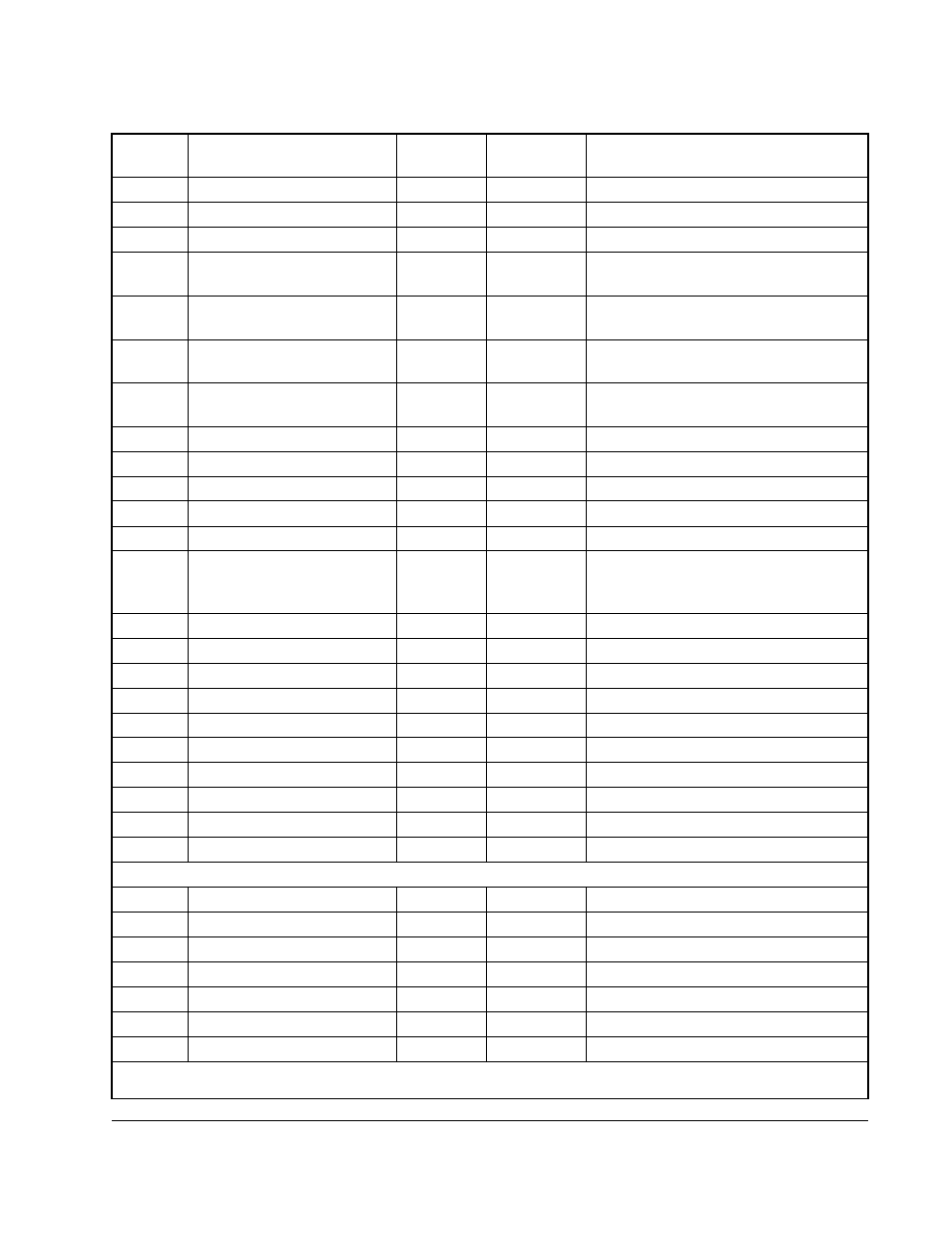
Register Map
7-3
N10:58
Reserved
P.058
Note 1
N10:59
Reserved
P.059
Note 1
N10:60
Node Number
P.060
Read Only
2 to 99
N10:61
Prog/Run Mode
P.061
Configurable 0 = stop,1 = not stop,
3 = term strip control
N10:62
Option Port: Communication
Loss Response
P.062
Tunable
0 = IET flt; 1 = hold last; 2 = term strip
reference; 3 = term strip control
N10:63
Option Port: Network Ref.
Source (not used)
P.063
Note 1
N10:64
Option. Port: Network Trim
Ref. Source (not used)
P.064
Note 1
N10:65
CNI Version
P.065
Read Only
5200 = CNI version 2.00
N10:66
Network Output Reg 1
P.066
Tunable
0 to 12
N10:67
Network Output Reg 2
P.067
Tunable
0 to 12
N10:68
Network Output Reg 3
P.068
Tunable
0 to 12
N10:69
Network Output Reg 4
P.069
Tunable
0 to 12
N10:70
|
N10:89
Reserved
P.070
|
P.089
Note 1
N10:90
Diagnostics Source
P.090
Tunable
0 to 19
N10:91
Diagnostics Display
P.091
Read Only
N10:92
Reserved
P.0920
Note 1
N10:93
Reserved
P.093
Note 1
N10:94
Reserved
P.094
Note 1
N10:95
Power Module Output Amps
P.095
Read Only
100 = 10.0 A
N10:96
Reserved
P.096
Note 1
N10:97
Reserved
P.097
Note 1
N10:98
Software Version Number
P.098
Read Only
600 = version 6.00
N10:99
Power Module Type
P.099
Read Only
4.005 = 460 V, 5 HP
H Parameters
N10:100
Motor Nameplate Volts
H.000
Configurable 460 = 460 V
N10:101
Motor Nameplate Base Freq
H.001
Configurable 600 = 60.0 Hz
N10:102
Motor Nameplate Amps
H.002
Configurable 100 = 10.0 A
N10:103
Torque Boost Voltage
H.003
Configurable 5 = 0.5%
N10:104
Slip Compensation
H.004
Tunable
0 = 0.0%
N10:105
DC Braking Enable
H.005
Tunable
0 = off; 1 = on
N10:106
DC Braking Start Frequency
H.006
Tunable
50 = 5.0 Hz
Table 7.1 – File N10:X (Drive Read/Write Parameters)
File
Address
Parameter Name
Parameter
Number
Type
Notes
Note 1: This parameter cannot be changed from the ControlNet network, or it is reserved. When writing to this parameter, use
a value of 0. When you read this parameter, you receive a value of 0.