Lenze CANopen control technology User Manual
Page 61
DMS 4.2 EN 07/2011 TD17
L
61
Control technology | CANopen communication manual
Commissioning the CANopen Logic bus
Setting of CAN parameters and CAN mapping
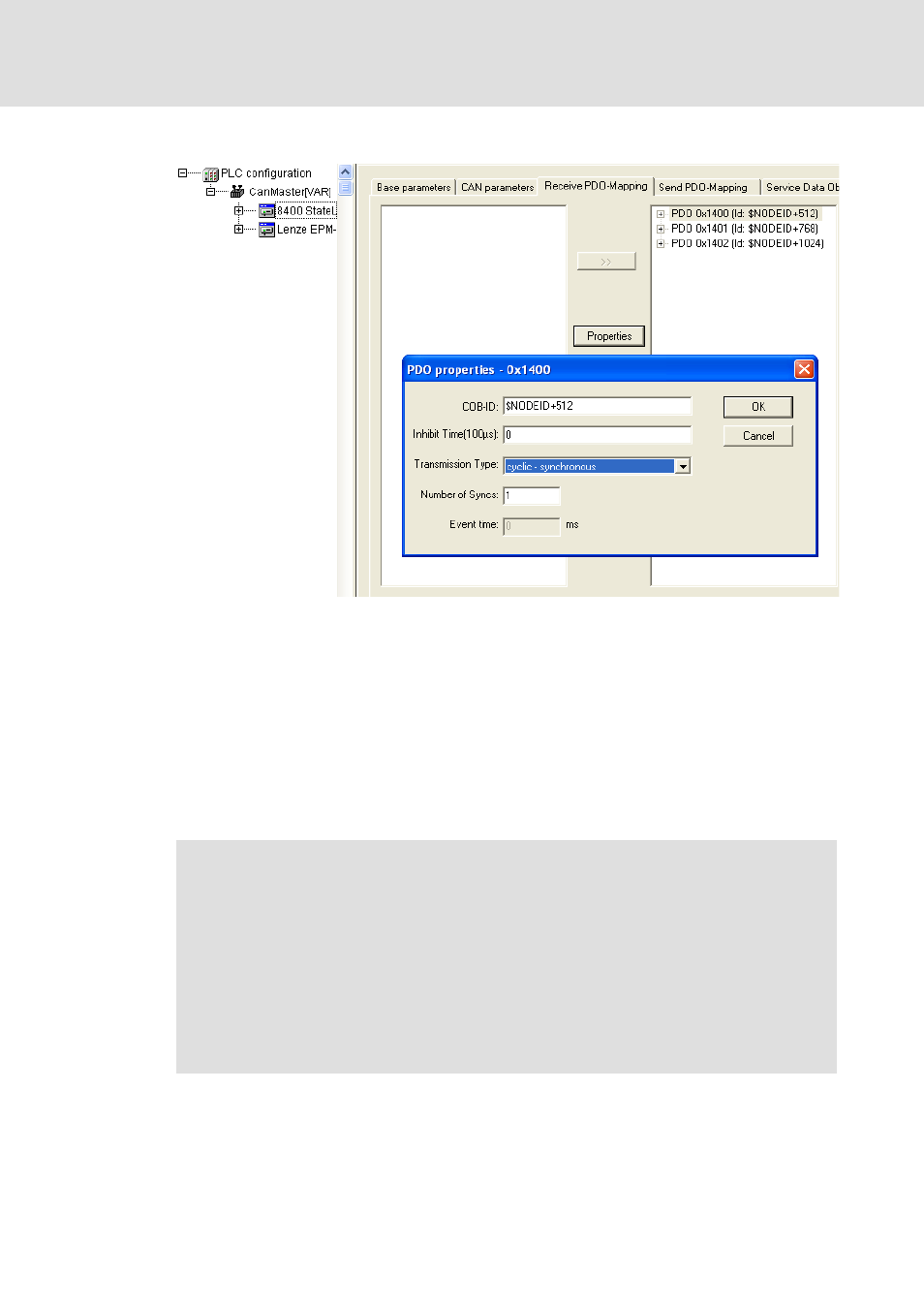
2. Change to the Receive PDO-Mapping / Send PDO-Mapping tab:
• Here, configure the PDOs the field device is to receive and transmit. Define the
transmission properties.
• The ports of the application are on the left, the available PDOs of the used
interface are on the right. Define suitable transmission properties for the PDOs
to be filled. Remove the PDOs which cannot be transmitted.
• Mapped variables in the PDOs also appear in the control configuration tree.
• We recommend to set the "cyclic - synchronous" transmission type and to
specify the number of syncs at which the PDOs are to be sent.
• The settings of the event time via the "PDO properties - ..." dialog are not
evaluated.
Note!
If you operate a fieldbus without CAN synchronisation, please observe the
following:
• The control system always transmits asynchronous PDOs from an unsolicited
task in an event-controlled way. To achieve a time-controlled transmission of
asynchronous PDOs by the control system, you must assign the CAN master
to a cyclic task.
• The control does not support any monitoring times for asynchronous receive-
PDOs. This is only possible with field devices.