1 special features of the servo drives 9400, Special features of the servo drives 9400, Basic identifier - 9400 servo drives – Lenze CANopen control technology User Manual
Page 30: Control technology | canopen communication manual
Control technology | CANopen communication manual
Planning the CANopen network
Device specifications of the field devices
30
L
DMS 4.2 EN 07/2011 TD17
6.2.1
Special features of the Servo Drives 9400
The parameter data channel 1 is always active.
The optional parameter data channels 2 ... 10 can be activated via the subcodes of the
codes Cxx372 and Cxx373.
If bit 31 is set (0x8nnnnnnn
hex
), the corresponding SDO server is deactivated.
In order to change the COB-ID of a currently active parameter data channel, you have
to first deactivate it and then activate it with a changed COB-ID. Both processes must
be rendered effective by a "Reset Node" command via C00002.
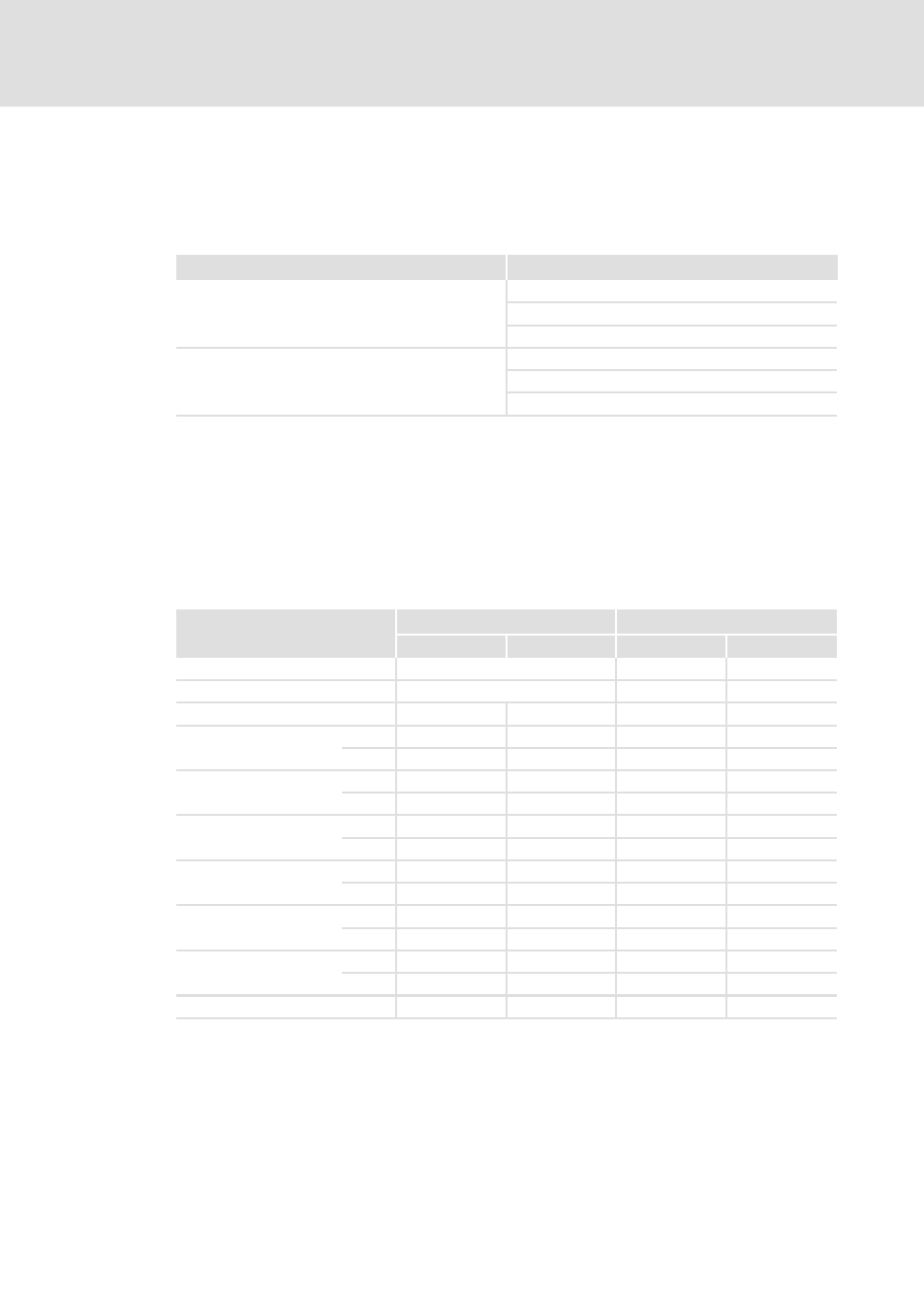
Basic identifier - 9400 Servo Drives
The default setting of the basic identifier is as follows:
1) When creating the sync transmit/receive identifier manually, observe the use of the emergency telegram because of
the same COB-ID.
SDO identifier
Code
CANopen SDO server Rx identifier
C00372: CAN on board
C13372: Module in slot 1
C14372: Module in slot 2
CANopen SDO server Tx identifier
C00373: CAN on board
C13373: Module in slot 1
C14373: Module in slot 2
Object
Direction
Basic identifier
from the drive
to the drive
dec
hex
NMT
0
0
Sync 1)
128
80
Emergency
z
128
80
PDO1
(process data channel 1)
TPDO1
z
384
180
RPDO1
z
512
200
PDO2
(process data channel 2)
TPDO2
z
640
280
RPDO2
z
768
300
PDO3
(process data channel 3)
TPDO3
z
896
380
RPDO3
z
1024
400
PDO4
(process data channel 4)
TPDO4
z
1152
480
RPDO4
z
1280
500
SDO1
(parameter data channel 1)
TSDO1
z
1408
580
RSDO1
z
1536
600
SDO2 ... 10
(parameter data channel 2 ... 10)
TSDOx
z
1472
5C0
RSDOx
z
1600
640
Node guarding, heartbeat
z
1792
700