6 special features of the ecs servo system, Special features of the ecs servo system, Control technology | canopen communication manual – Lenze CANopen control technology User Manual
Page 35
DMS 4.2 EN 07/2011 TD17
L
35
Control technology | CANopen communication manual
Planning the CANopen network
Device specifications of the field devices
6.2.6
Special features of the ECS servo system
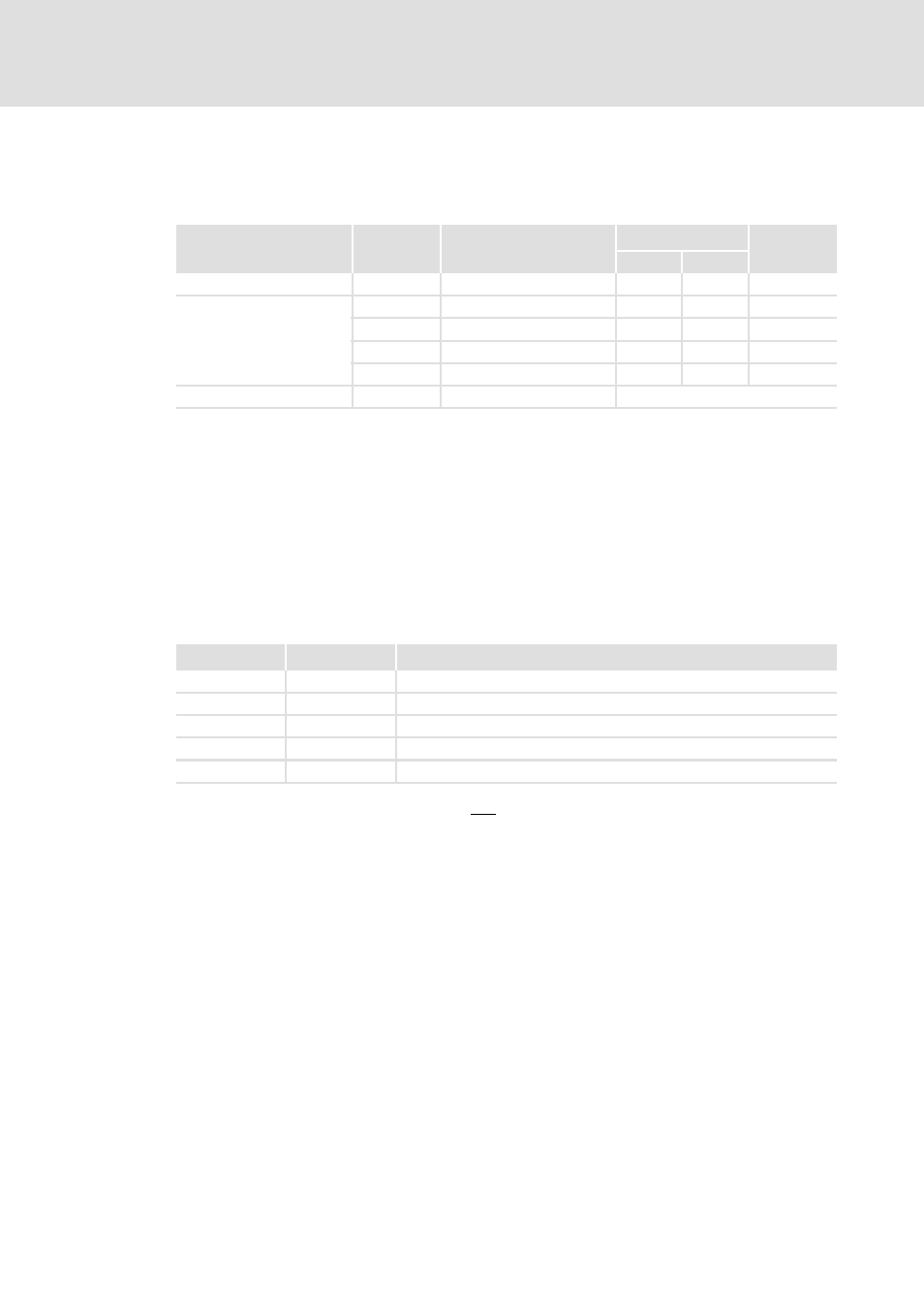
Modules of the ECS servo system
Special features of the ECSxE power supply module
In case of ECSxE power supply modules one refers to CAN1 and CAN3. In fact, here there is
one single process data channel (PDO). It is referred to as CAN1 if it operates in a sync-
controlled manner and as CAN3 if it operates in a time or event-controlled manner. CAN1
and CAN3 cannot be used at the same time. The change-over of the transmission mode
and therefore between CAN1 and CAN3 is effected in C0360. The ECSxE power supply
module has no CAN2.
For historical reasons, the ECSxE power supply module has several subcodes for setting the
PDO properties.
The existence of these subcodes does not mean that they are independent PDOs. The
respective subcode that is effective depends on the setting in C0360. The subcodes 2 with
regard to CAN2 do not have any effect.
Module
Type
Application software
CANopen
CAN interface
Logic
Motion
Power supply module
ECSxE
-
z
-
X4
Axis module
ECSXS
"Speed and Torque"
z
-
X4
ECSxP
"Posi and Shaft"
z
-
X4
ECSxM
"Motion"
-
z
X4
ECSxA
"Application" (PLC)
z
-
X4 or X14
Capacitor module
ECSxK
-
No CAN communication
Code
Subcodes
Description
C0353
1, 3
Mode for ID creation (COB-ID) CAN-IN/OUT
C0354
1, 3
ID offset CAN-IN/OUT
C0355
1, 3
CAN-IN/OUT identifier (COB-IDs), read only
C0356
1, 3, 4
CAN3-IN/OUT time settings: cycle time, activation delay
C0357
1, 3
CAN-IN monitoring