4 system bus (can) / canopen, 1 canopen (logic) / canopen (motion), System bus (can) / canopen – Lenze CANopen control technology User Manual
Page 15: Canopen (logic) / canopen (motion)
DMS 4.2 EN 07/2011 TD17
L
15
Control technology | CANopen communication manual
System bus (CAN) / CANopen
CANopen (Logic) / CANopen (Motion)
4
System bus (CAN) / CANopen
Lenze device series 8200 vector, 9300 and ECS have an on-board system bus (CAN)
connection. The protocol used there is a subset of CANopen. Thus the devices are not
CANopen-conform but can be driven by a CANopen-compatible control under "L-force
Controls" - also in connection with other CANopen-compatible nodes.
4.1
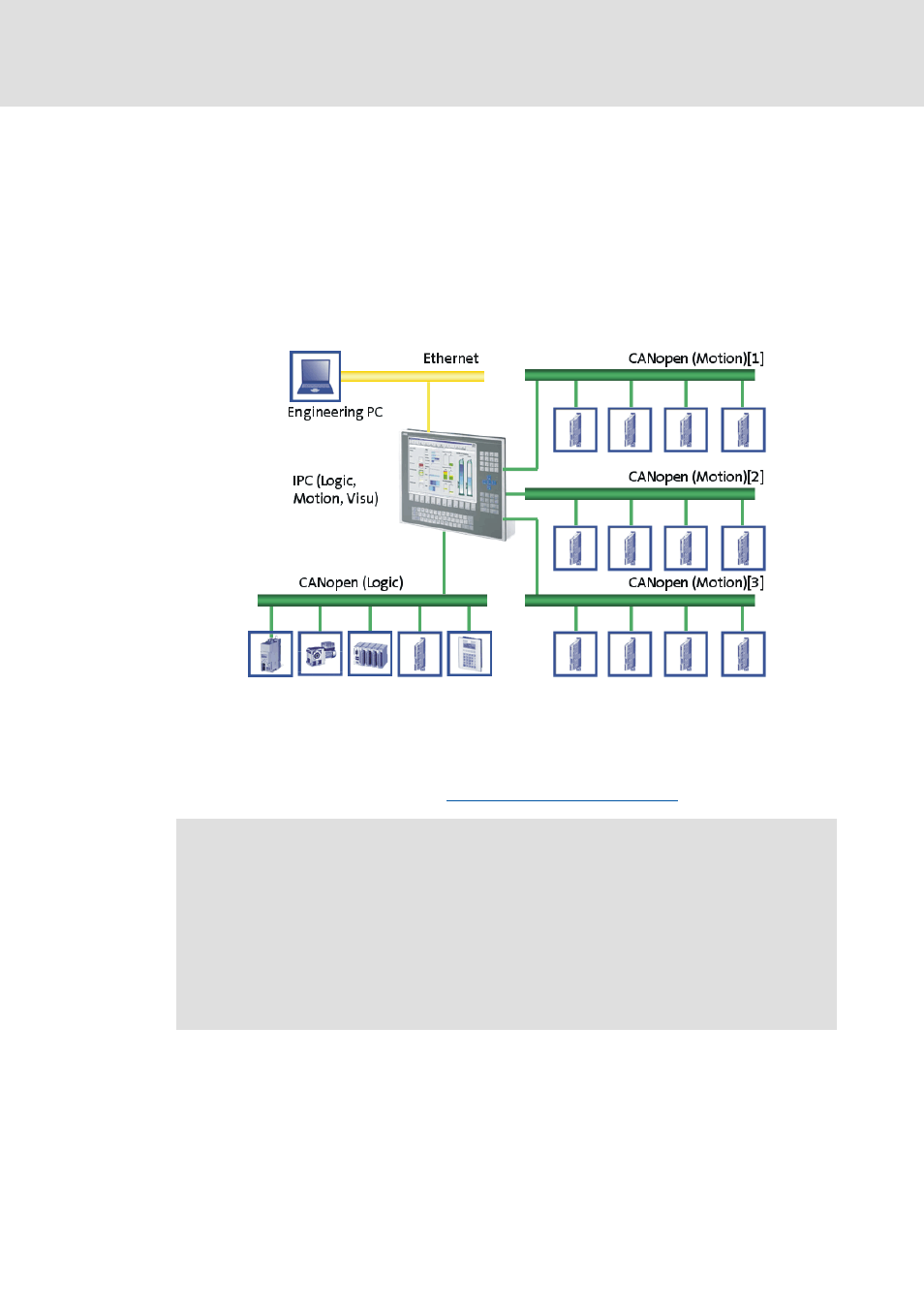
CANopen (Logic) / CANopen (Motion)
Due to the demands on the real-time behaviour of the bus system and the limited transfer
capacity, the CANopen bus must be divided into a Logic and a Motion bus.
The Logic bus and the Motion buses can be connected to many different field devices.
To establish a CANopen bus, use the
Note!
Depending on the required Motion node number and bus cycle time, up to 4
Motion buses can be established.
Only 2 buses are possible for the CS x8xx Command Station IPC series.
Conventions for "PC-based Automation"
• Interface CAN1: CANopen (Logic) or CANopen (Motion)
• Interface CAN2 ... 4: CANopen (Motion)