Badger Meter SRD/SRI Valve Positioners User Manual
Page 47
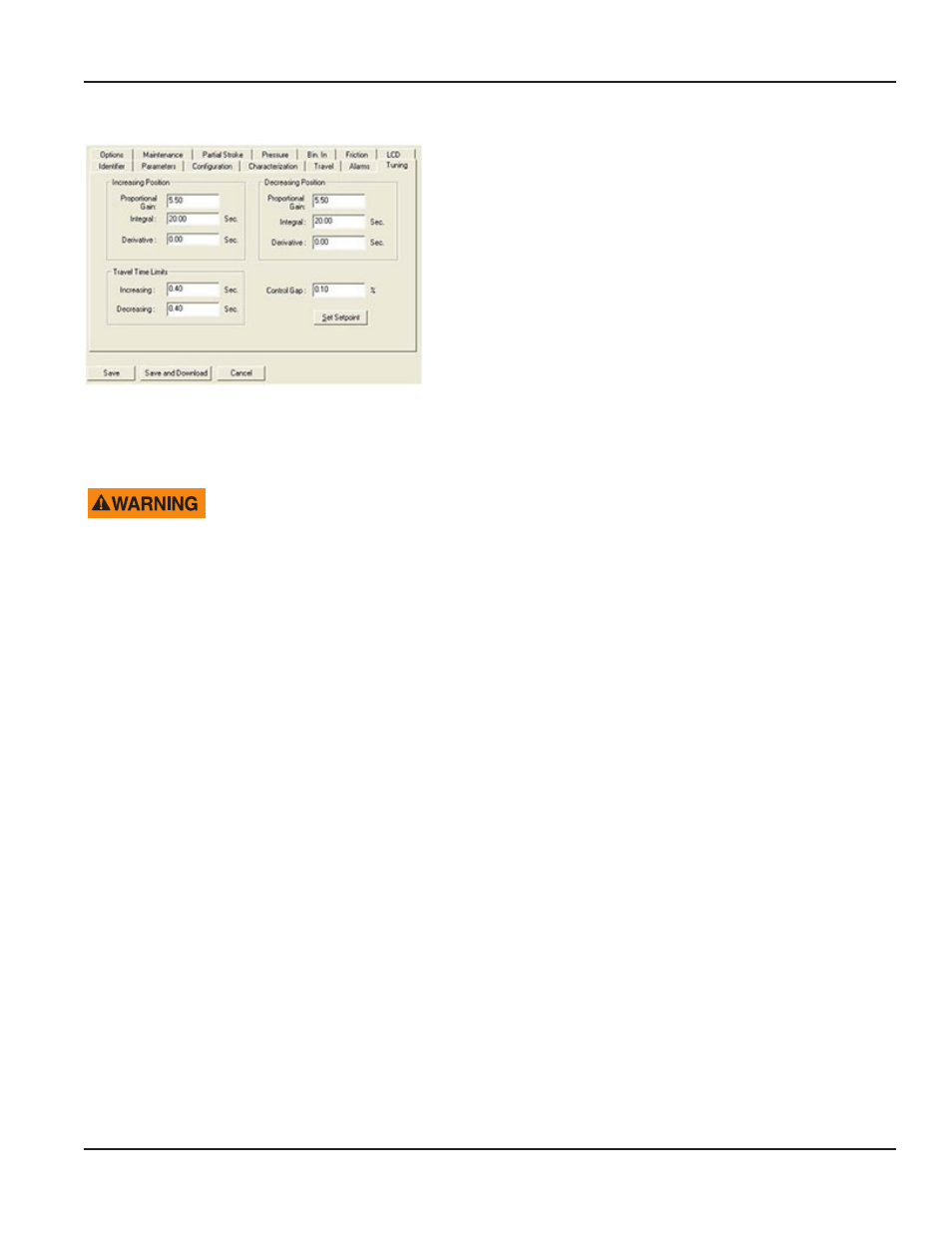
Tuning Page
The Intelligent Positioner SRD991 uses a PID (Proportional-Integral-
Derivative) algorithm for position control . The PID tuning parameters
are determined automatically during the Autostart process or can be
entered manually by user .
To view or manually change the tuning parameters, use the Tuning page
(Edit > Configuration) . Since there might be differences in the dynamic
behavior of the control valve when the Positioner output is increasing
vs . decreasing, two different sets are available . Each set has Proportional
(proportional gain, unit-less), Integral (reset time, sec) and Derivative
(derivative time, sec) . These fields are automatically populated after
Autostart is run .
Derivative term, since it may lead to instability if not properly defined, is set to 0 when the tuning parameters are determined
by Autostart . Users are encouraged against inputting high derivative times since loop stability may be sacrificed .
To check the valve’s control behavior after the calibration cycle, you can apply setpoint changes to the positioner .
CHANGING VALVE POSITION MAY UPSET THE PROCESS.
To check the valve’s control behavior, select Set Setpoint from the Tuning screen or from Simulation in the menu structure .
Setpoint, position and error can be observed in the Device Data page, as the setpoint to positioner is being varied . The
overshoot in the response, size of minimum step in input to cause an output change, approximate time delays and times
required to complete steps can all be used as criteria to judge control behavior . The Simulation can also be done by means of
the local push buttons under Menu 8 . Here the Simulation can be done manually in steps of 12 .5% or 1% .
In general, too much gain (by proportional, integral and derivative terms) will lead to instability in the form of continuous or
decaying oscillation .
Slow or sluggish response, as shown in output2, may be caused by inadequate positioner gain . A reasonable tuning set may
yield a response similar to output3 .
Too much derivative action may yield stability problems, therefore it should be handled carefully . Most of the time,
Proportional and Integral action (PI controller) may yield acceptable control behavior . In certain cases (for instance,
integrating processes), Integral gain may also cause poor stability in the form of limit cycling and thus should be limited .
In searching for the optimal tuning parameters, change only one parameter at a time (for instance, Proportional gain, Reset
Time) . The tuning sets for increasing and decreasing positioner outputs will generally be different . Accordingly, both "up" and
"down" steps need to be applied for checking response with different tuning parameters .
If the stability of the control valve may not be improved by tuning sets alone, another way to slow down the positioner is by
changing the Travel Time Limits in the Tuning page (Edit > Configuration) . Inputting times longer than the defaults will make
the positioner response slower .
In the above example,
Travel time limit (output3) > Travel time limit (output2) > Response time limit
If stability cannot be achieved by tuning or travel time limit, then damping adjustments in the pneumatic amplifiers may be
made to reduce air output capacity of positioner . This is only applicable to actuators with small volume since reducing air
capacity would lead to sluggish response in large actuators . On the other hand, if valve response is too slow regardless of
tuning set, which may be the case with large actuators, then positioner’s output capacity might have to be increased by using
pneumatic boosters .
Configuration / Parameter
Page 47
August 2014
POS-UM-00011-EN-02