Pid control block parameters – Micromod MOD: 1800P - MOD 30ML Identity Module (Version 2) PID and Ramp/Soak Functions User Manual
Page 17
Continuous Control Functions
PID CONTROL BLOCK
2-11
Error Checks
If a calculation error occurs in the PID calculation, and the set qualities bad attribute is TRUE,
then the output qualities (output and track status) are set BAD. The PID calculation will be
initialized when qualities become good again.
In a cycle where the PID outputs have been previously marked BAD, but can now be
successfully calculated (required inputs are good), and the controller mode is AUTO or
CASCADE, the PID algorithm will initialize using the present output value. It is recommended
that the application design provide logic ’downstream’ of the PID block to set a track signal
when the PID qualities go bad. This way, the PID block will initialize from the track value
when it is again capable of executing, which would most likely be the preferred method of
initialization.
2.2.2
PID Control Block Parameters
The mnemonics, valid values, and data types for all fields that may be selected for display
and/or be used in making softwiring connections are listed in Table 2-1. The following further
defines the PID Control block configuration parameters.
Block Type
PID
This is the PID Control block type and is configured on the Function
Block Selection page.
Occurrence
1 to 4096
There may be up to 4096 ‘instances’ allowed of the PID block type.
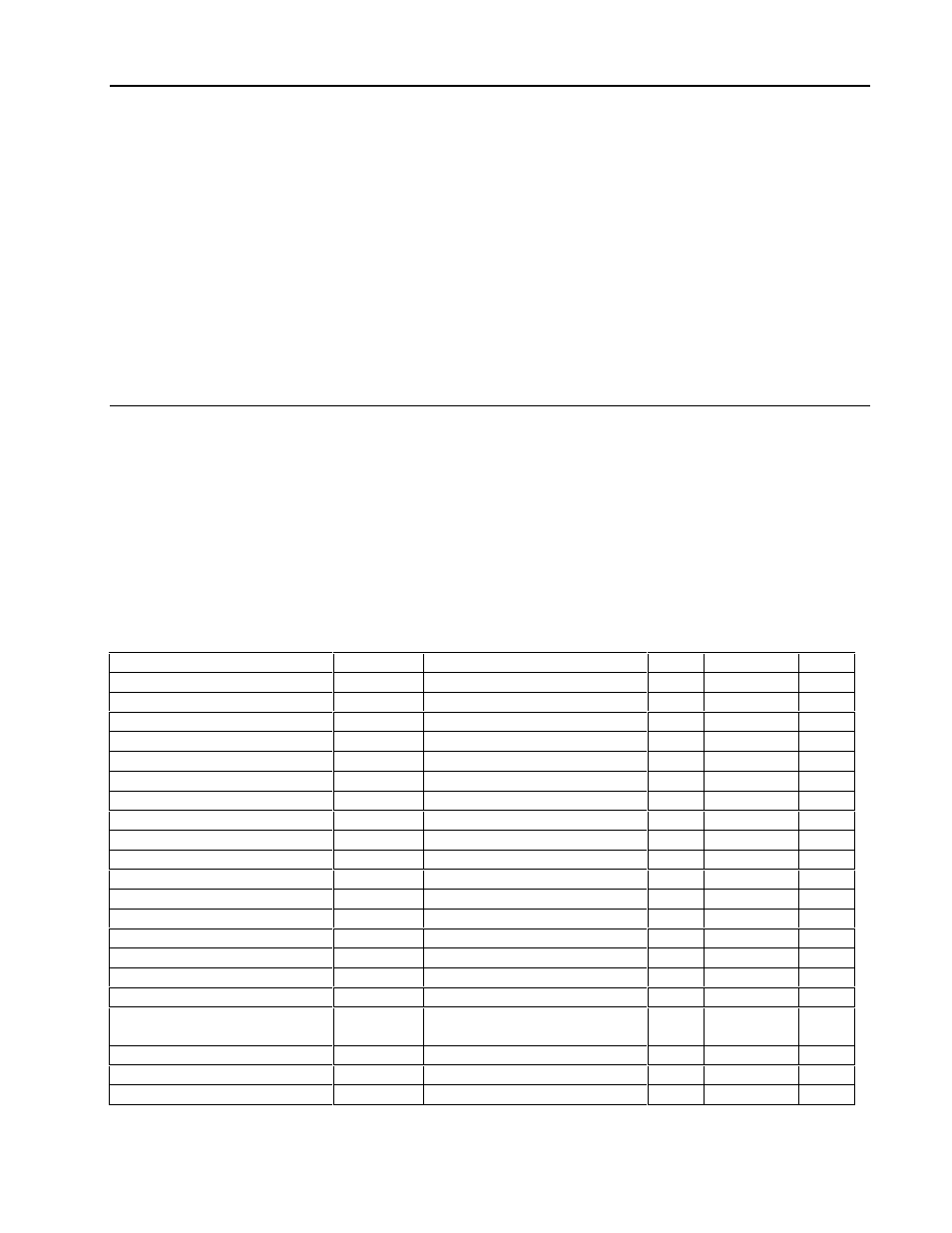
Table 2-1. PID Control Block Attributes, Valid Values, Mnemonics, and Data Types
Field Name /
Attribute
Mnemonic
Valid Values
CWR
Data Type
Attr
Version
VERSION
1
– – R Long State
00
Block Length
BLKLEN
– – R Count
01
Block State
STATE
RUN, HOLD, OFF, DEBUG
CWR Short State
02
Bad Inputs Accepted
BADINP
NO(0), YES(1)
CWR Discrete
03
Diagnostic Group
SUPPGRP
NONE, 1, 2, 3, 4, 5, 6, 7
CWR Long State
04
Calculation Error
CERRS
ENABLE(0), SUPPRESS(1)
CWR Discrete
05
Calc. Error Unacked
CERRU
NO(0), YES(1)
– WR Discrete
06
Calc. Error Unacked Quality
CERRUQ
GOOD(0), BAD(1)
– WR Discrete
07
Calc. Error Active
CERRA
NO(0), YES(1)
– WR Discrete
08
Calc. Error Active Quality
CERRAQ
GOOD(0), BAD(1)
– WR Discrete
09
Output Calculation Error
OPCERRS ENABLE(0), SUPPRESS(1)
CWR Discrete
10
Output Calc. Error Unacked
OPCERRU NO(0), YES(1)
– WR Discrete
11
Output Calc. Error Unacked Q
OPCERRUQ
GOOD(0), BAD(1)
– WR Discrete
12
Output Calc. Error Active
OPCERRA NO(0), YES(1)
– WR Discrete
13
Output Calc. Error Active Q
OPCERRAQ
GOOD(0), BAD(1)
– WR Discrete
14
Control Interval
CI
Msec Time Value
CWR Msec Time
15
Setpoint Modes Allowed
SPMA
L(1), R(2), L.R(3)
C – R Count
16
Setpoint Mode Status,
Initial Value
SPMS
LOCAL(0), REMOTE(1),
TRACK(3)*, FAULT(5)*
CWR Short State
17
Setpoint Mode Status Quality
SPMSQ
GOOD(0), BAD(1)
– WR Discrete
18
Setpoint Mode Command
SPMC
LOCAL(0), REMOTE(1)
– – R Short State
19
Setpoint Track Enable
SPTE
NO(0), YES(1)
C – R Discrete
20