Chapter 5 instruction specifications – Hitachi NJI-350B User Manual
Page 123
Chapter 5 Instruction Specifications
5-73
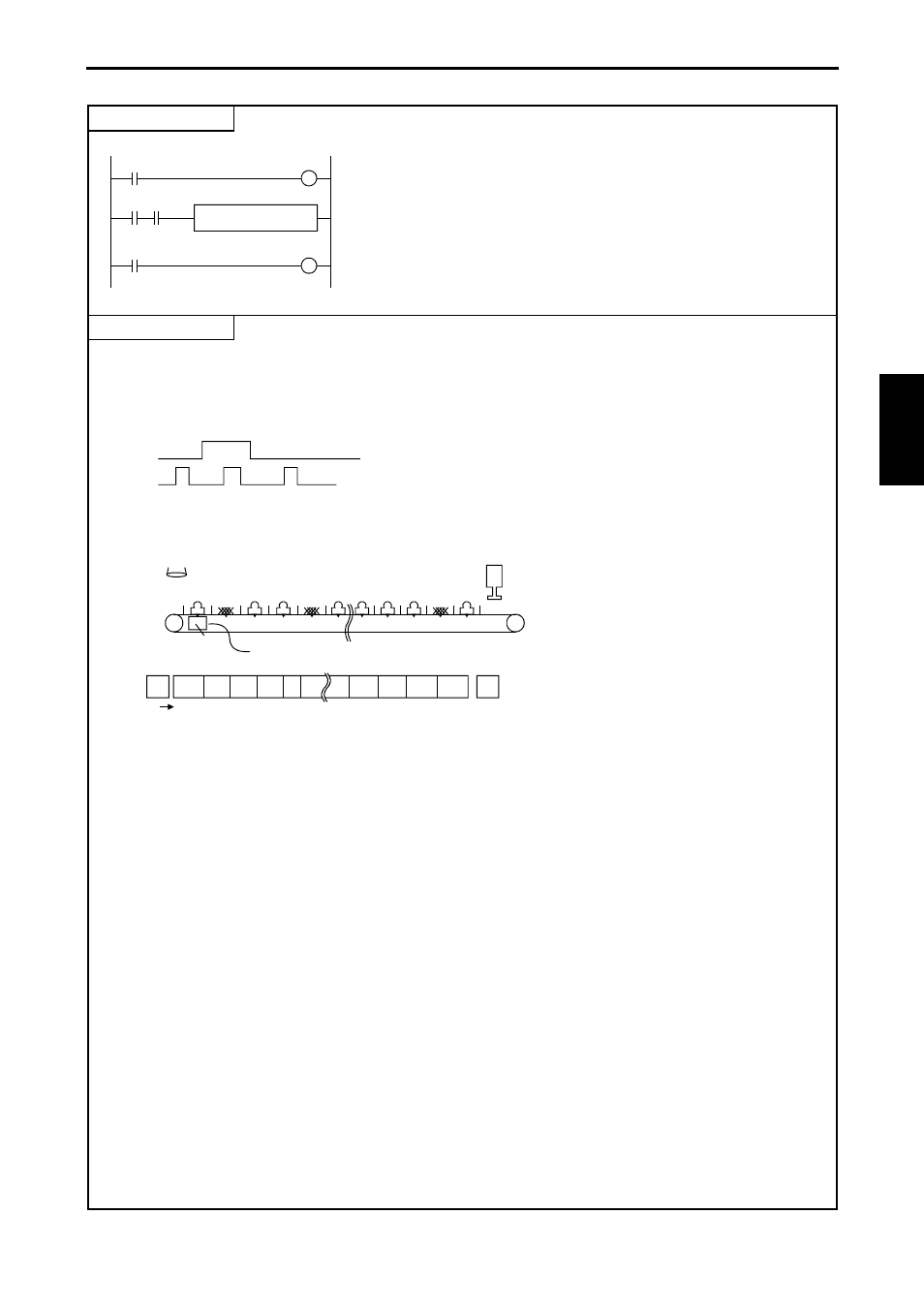
Program example
X00000
X00001 DIF1
R7F2
R7F0
Y00100
SHR (DR0000,1)
X00000 . . . . .
X00001 . . . . .
. . . . .
LD
X00000
OUT R7F2
LD
X00001
AND DIF1
[
SHR
(DR0000,1)
]
LD
R7F0
OUT Y00100
Defective unit input
To SD
Conveyor movement
Defective unit output
Carry
Y00001
Program description
• There exists a conveyor that has 16 stands and is moving to the right.
• Each time the conveyor moves one stand to the right, a pulse input enters X1.
• There is a sensor on the left end of the conveyor, and when a defective unit is placed on the conveyor, X00000 turns on.
X00000 (sensor input) and X00001 (conveyor movement) signals are as follows:
X00000
X00001
• As the conveyor moves to the right, the data is also shifted one bit at a time, and when data exits to the carry (on the right
end of the conveyor), the (Y00100) solenoid valve turns on and rejects the defective unit.
b16
(Y00100)
b0
X00001
0
1
0
0
1
0
0
0
0
1
0
b16
b0
SD (R7F2)
X00000
C (R7F0)
Y00000
Sensor (X00000)
Solenoid valve
Conveyor movement
Shifts one bit at a time
SH
R
(
d, n
)