2 calibration theory, 1 calibration with three measurements, Calibration theory – Maxim Integrated 71M6541 Demo Board User Manual
Page 37: Calibration with three measurements, Figure 2-4: watt meter with gain and phase errors, 1) cos( 1 ) 0 cos( ) 0 cos, Aiv a a iv e, Cos( 1, Ea a
71M6541 Demo Board REV 3.0 User’s Manual
37
Rev 4.0
2.2 CALIBRATION THEORY
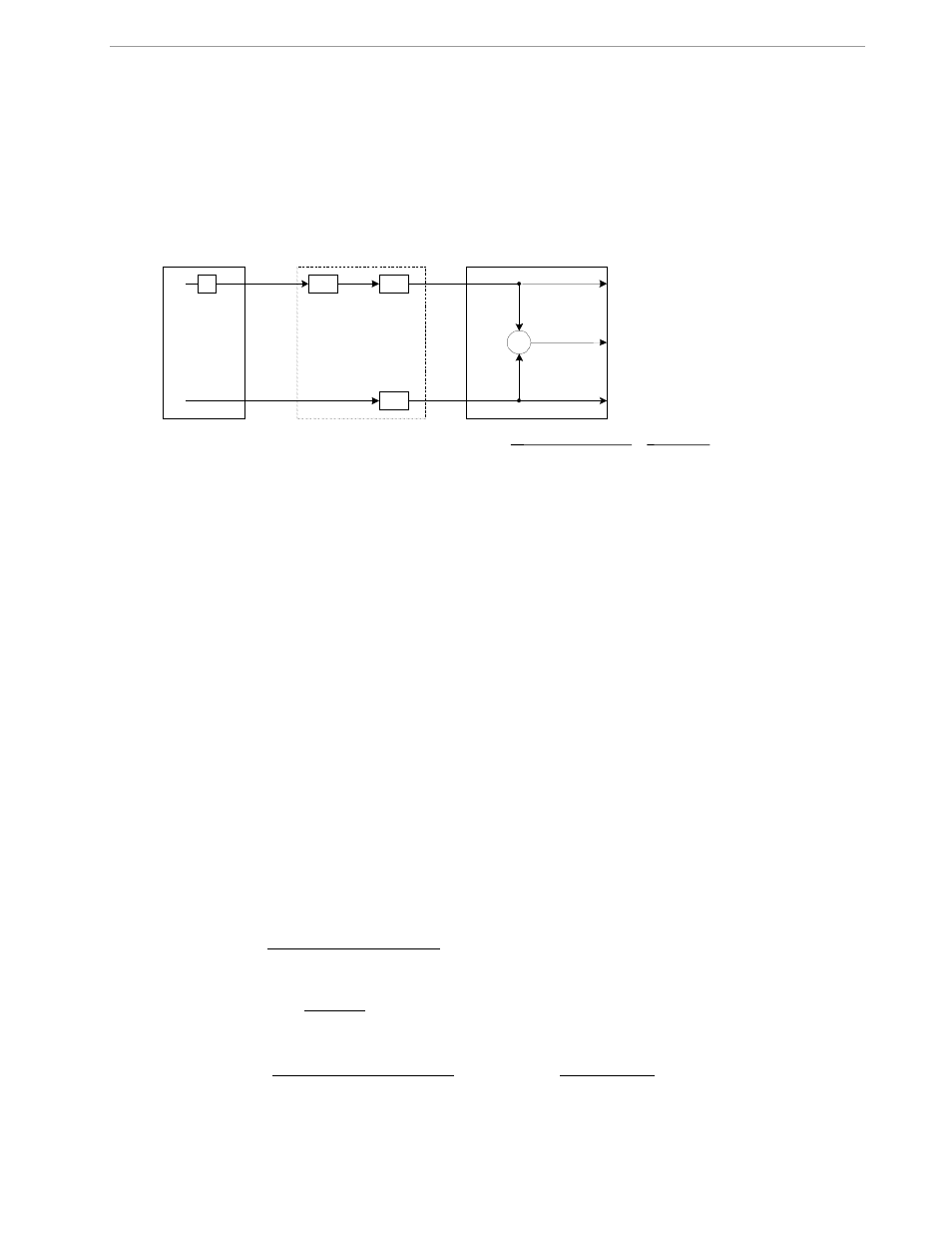
A typical meter has phase and gain errors as shown by
φ
S
, A
XI
, and A
XV
in Figure 2-5. Following the typical me-
ter convention of current phase being in the lag direction, the small amount of phase lead in a typical current
sensor is represented as -
φ
S
. The errors shown in Figure 2-5 represent the sum of all gain and phase errors.
They include errors in voltage attenuators, current sensors, and in ADC gains. In other words, no errors are
made in the ‘input’ or ‘meter’ boxes.
Π
I
V
φ
L
INPUT
−φ
S
A
XI
A
XV
ERRORS
)
cos(
L
IV
IDEAL
φ
=
)
cos(
S
L
XV
XI
A
A
IV
ACTUAL
φ
φ
−
=
1
−
=
−
≡
IDEAL
ACTUAL
IDEAL
IDEAL
ACTUAL
ERROR
W
I
RMS
METER
V
RMS
XI
A
I
ACTUAL
I
IDEAL
=
= ,
XV
A
V
ACTUAL
V
IDEAL
=
=
,
φ
L
is phase lag
φ
S
is phase lead
Figure 2-5: Watt Meter with Gain and Phase Errors.
During the calibration phase, we measure errors and then introduce correction factors to nullify their effect. With
three unknowns to determine, we must make at least three measurements. If we make more measurements, we
can average the results and get better accuracy.
2.2.1 CALIBRATION WITH THREE MEASUREMENTS
The simplest calibration method is to make three measurements. Typically, a voltage measurement and two
Watt-hour (Wh) measurements are made. A voltage display can be obtained for test purposes via the command
>MR2.1 in the serial interface.
Let’s say the voltage measurement has the error E
V
and the two Wh measurements have errors E
0
and E
60
,
where E
0
is measured with
φ
L
= 0 and E
60
is measured with
φ
L
= 60. These values should be simple ratios—not
percentage values. They should be zero when the meter is accurate and negative when the meter runs slow.
The fundamental frequency is f
0
. T is equal to 1/f
S
, where f
S
is the sample frequency (2560.62Hz). Set all cali-
bration factors to nominal:
CAL_IA
= 16384,
CAL_VA
= 16384,
PHADJA
= 0.
Note: In the formulae used in this section, the register /variable name
PHADJA
is used. The CE code for
the 71M6541 in reality uses a more advanced type of compensation that results in a delay adjust. The
register name for this compensation factor is
DLYADJ_A
. For the purpose of the calculation, the two
names are interchangeable.
From the voltage measurement, we determine that
1.
1
+
=
V
XV
E
A
We use the other two measurements to determine
φ
S
and A
XI
.
2.
1
)
cos(
1
)
0
cos(
)
0
cos(
0
−
=
−
−
=
S
XI
XV
S
XI
XV
A
A
IV
A
A
IV
E
φ
φ
2a.
)
cos(
1
0
S
XI
XV
E
A
A
φ
+
=
3.
1
)
60
cos(
)
60
cos(
1
)
60
cos(
)
60
cos(
60
−
−
=
−
−
=
S
XI
XV
S
XI
XV
A
A
IV
A
A
IV
E
φ
φ