Rockwell Automation 1329I DeviceNet Option FRN 1.XXX User Manual
Page 60
B-6
Parameters
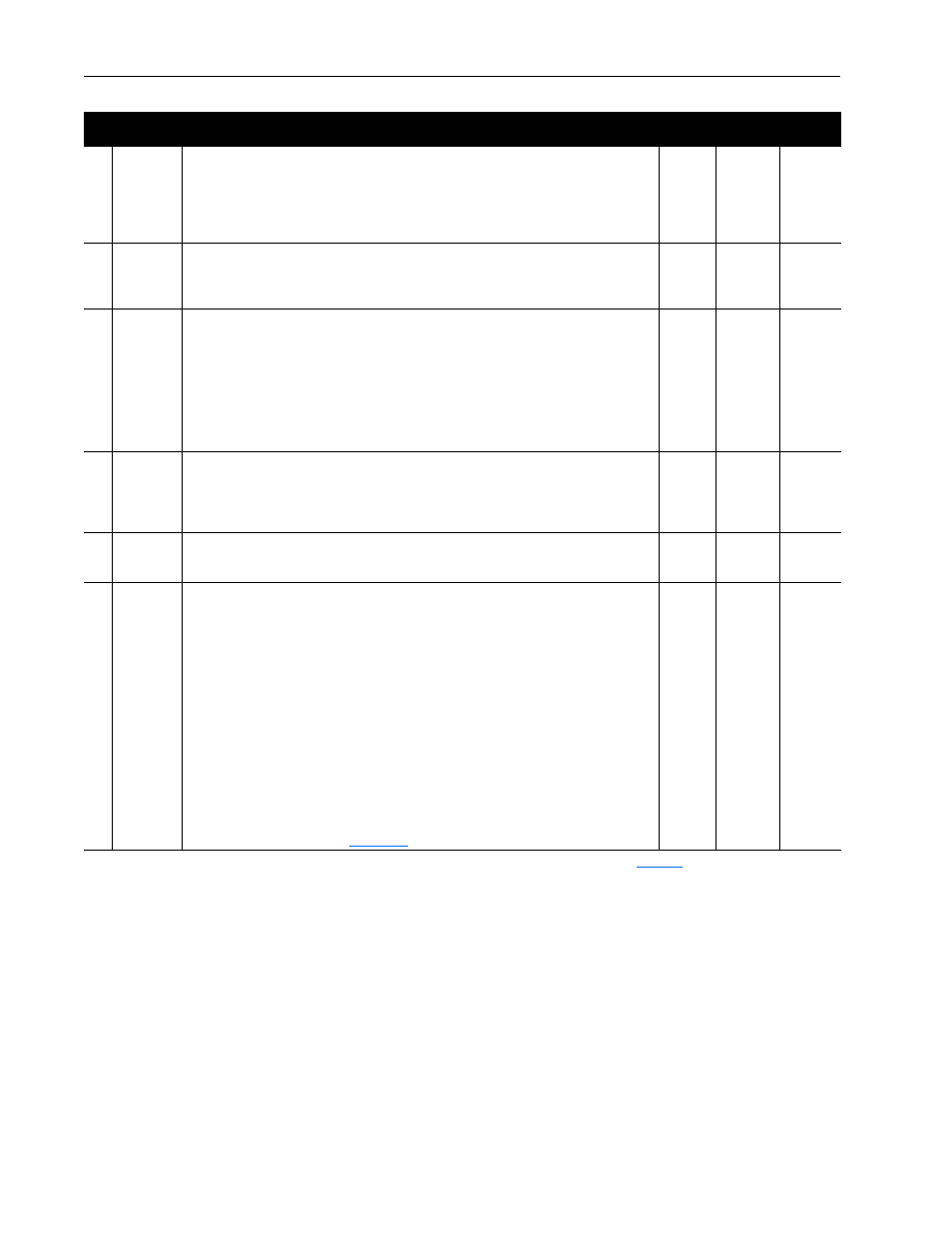
102 0x0F-102-1 Switches Baud
The state of the baud rate DIP switches (7 – 8).
0 = 125K BPS
1 = 250K BPS
2 = 500K BPS
3 = Use nonvolatile parameters for node address and baud rate settings.
Get
0 to 3
3
103 0x0F-103-1 NV MAC ID
Node address independent of the node address DIP switches. To use this address, set both
baud rate switches to On before power up. Changes to this parameter take effect only after
power is cycled.
Get/Set
0 to 63
63
104 0x0F-104-1 NV Baud Rate
Baud address independent of the baud rate DIP switches. To use this baud rate, set both
baud rate switches to On before power up. Changes to this parameter take effect only after
power is cycled. If you use the autobaud option, another node on the network must set the
data rate.
0 = 125 K BPS
1 = 250 K BPS
2 = 500 K BPS
3 = Autobaud
Get/Set
0 to 3
3
105 0x0F-105-1 Bus Off Error
Action of the DeviceNet option during a CAN Bus Off condition.
0 = Hold CAN chip in its bus off (reset) state when bus off is detected.
1 = If possible, fully reset the CAN chip and continue communicating when a bus off condition
is detected.
Get/Set
0 to 1
0
106 0x0F-106-1 Bus Off Count
The number of times the CAN chip went to a bus off state. The counter stops counting when
the count reaches 255. Any write to this parameter will reset the counter to 0.
Get/Set
0 to 255
0
107 0x0F-107-1 Output Assembly
The output assembly instance that is used for polled messaging with the master. The output
assembly defines the data format that the 1329I unit receives from the master. This parameter
determines the format of data being sent to the 1329I unit by the master. It is named
output
assembly because the DeviceNet specification refers to all assemblies as they relate to the
master. The following assembly instances are valid for this parameter:
0 = No Data (0 bytes)
1 = Basic Contactor Output (1 byte)
2 = Two Command Contactor Output (1 byte)
3 = Basic Overload Output (1 byte)
4 = Basic Motor Control Output (1 byte)
5 = 2 Command Motor Control (1 byte)
20 = Basic Speed Control (4 bytes)
21 = Extended Speed Control (4 bytes)
100 = Speed Control in Hz (4 bytes)
106 = Preset Control with speed (4 bytes)
Refer to the Assembly Object in
for the formats of the output assembly.
Get/
Set
(3)
0 to 106
20
#
Object
Mapping
Name and Description
Access
Rule
(1)
Units/
Range
Factory
Default
(1)
Get = Read. Set = Write. Set access is allowed only if DIP switch 10 on the 1329I Integrated drive/motor is set to On (
Figure 2.3
).
(2)
The parameter can be set only when the drive is stopped.
(3)
The parameter can be set only when the 1329 Integrated drive/motor does not have an active I/O connection.