Program group, 71 [ir compensation, 72 [slip compensation – Rockwell Automation 160 AC DRIVE SER B/FRN 5-6.XX User Manual
Page 39: 73 [reverse disable, 74 [analog select, 75 [analog input minimum, 76 [analog input maximum, 78 [compensation
Chapter 5 – Parameters and Programming
5-12
Program Group
P#
Parameter Description
Min/Max
Range
Units
Factory
Default
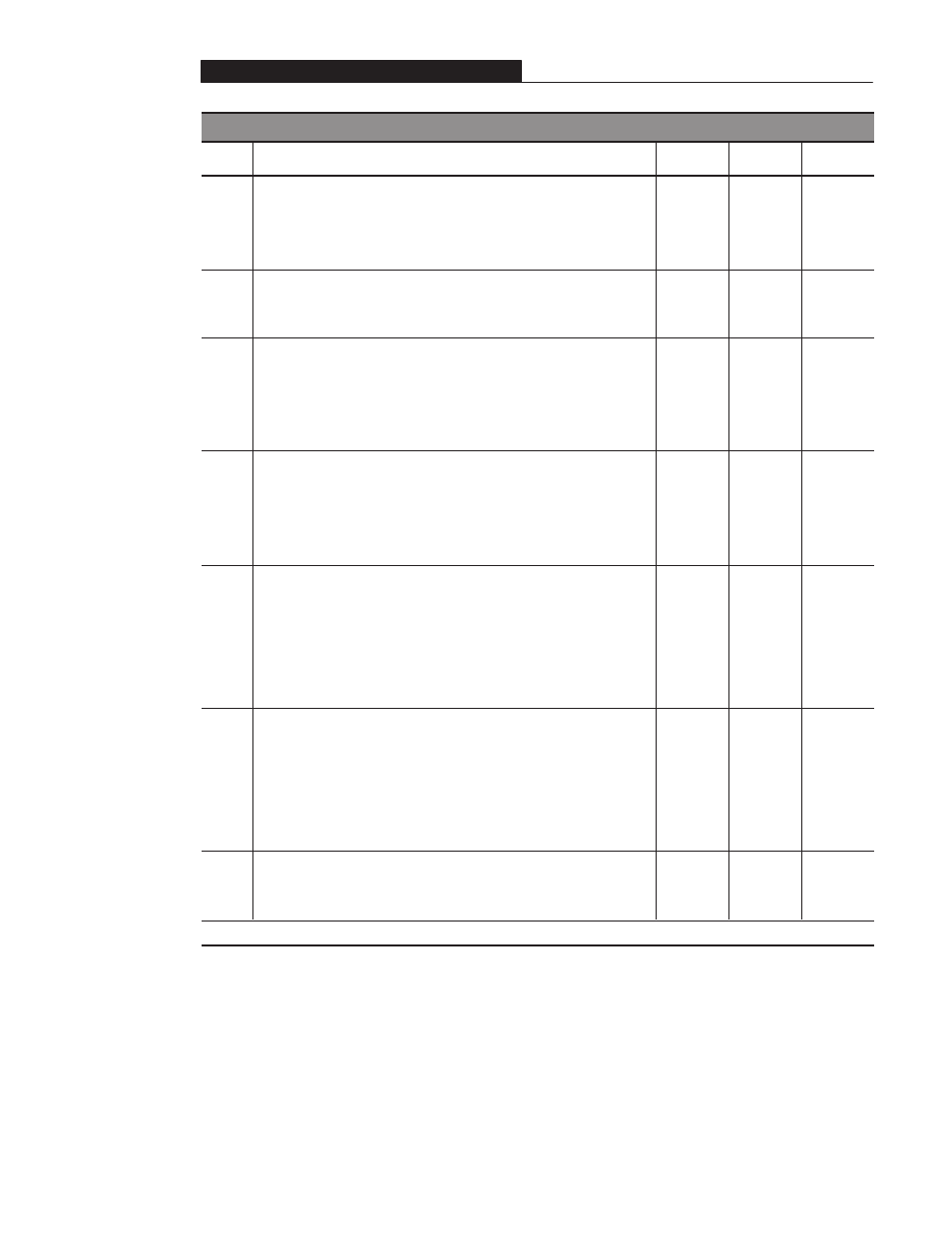
71
[IR Compensation]
The programmed value adds a voltage to the
output based on the torque current. An additional 31 volts (150%) are added to
460 volt units to compensate for stator resistance. 15.5 volts (150%) is added for
230 volt units. If the drive trips on an Overload fault (F7), or has trouble
accelerating to commanded speed, this value should be reduced. A setting of 0%
disables this function.
0 to 150
1%
50%
72
[Slip Compensation]
This parameter compensates for the inherent slip in an
induction motor. A frequency is added to the commanded output frequency based on
torque current. If motor shaft speed decreases significantly under heavy loads then this
value should be increased. A setting of 0.0 Hz disables the function.
0.0 to 5.0
0.1 Hz
2.0 Hz
73
[Reverse Disable]
When this parameter is set to a 1, the reverse is
disabled. The reverse command may come from the analog input, the TB3-5 input, the
keypad, or a serial command. With a negative analog input and reverse disabled, the
frequency command will be zero in bipolar mode and minimum frequency in unipolar
mode. All digital reverse inputs including two-wire “Run Reverse” will be ignored with
reverse disabled.
Important:
This parameter cannot be programmed while the drive is running.
0 to 1
Numeric
value
0
ЙЙЙ
Й
Й
Й
Й
Й
Й
Й
Й
Й
Й
Й
Й
ЙЙЙ
74
[Analog Select]
0 = unipolar analog input 0 to +10V
1 = bipolar analog input –10 to +10V
Important:
With bipolar analog input selected, the reverse inputs (keypad, terminal
block, serial) are ignored. In addition, two-wire “Run Reverse” commands, P75 –
[Analog Input Minimum] and P32 – [Minimum Frequency] settings are ignored.
Important:
This parameter cannot be programmed while the drive is running.
0 to 1
Numeric
value
0
ЙЙЙ
Й
Й
Й
Й
Й
Й
Й
Й
Й
Й
Й
Й
Й
Й
Й
ЙЙЙ
75
[Analog Input Minimum]
Important:
Do not adjust this parameter until setting P60 – [Zero Offset].
Sets the percent of analog input used to represent P32 – [Minimum Frequency]. If
the minimum analog input equals minimum frequency no action is needed. If it is
desired to adjust the analog input to equal [Minimum Frequency], use
P16 – [Analog Input] to adjust the analog input to the desired level and then enter
this value into P75.
Analog inversion can be accomplished by setting this value larger than P76.
Important:
This parameter cannot be programmed while the drive is running.
0.0 to 150.0
0.1%
0.0%
ЙЙЙ
Й
Й
Й
Й
Й
Й
Й
Й
Й
Й
Й
Й
Й
Й
Й
ЙЙЙ
76
[Analog Input Maximum]
Important:
Do not adjust this parameter until setting P60 – [Zero Offset].
Sets the percent of analog input used to represent P33 – [Maximum Frequency]. If
the maximum analog input equals maximum frequency no action is needed. If it is
desired to adjust the analog input to equal [Maximum Frequency], use
P16 – [Analog Input] to adjust the analog input to the desired level and then enter
this value into P76.
Analog inversion can be accomplished by setting this value smaller than P75.
Important:
This parameter cannot be programmed while the drive is running.
0.0 to 150.0
0.1%
100.0%
78
[Compensation]
Some drive/motor combinations have inherent instabilities
which are exhibited as non-sinusoidal motor currents. A setting of 1 will enable this
parameter and attempt to correct this condition. A setting of 0 disables this function.
Important:
Available in FRN 6.XX and later.
0 to 1
Numeric
value
0
ЙЙЙ
ЙЙЙ
=
This parameter applies only to the Analog Signal Follower model.