14 implemented cip™ objects – Lenze E84Dxxxx User Manual
Page 116
14
Implemented CIP™ objects
14.1
General CIP objects
116
Lenze · Decentralised frequency inverter 8400 protec (EtherNet/IP™ option) · Communication Manual · DMS 3.0 EN · 07/2014 · TD17
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
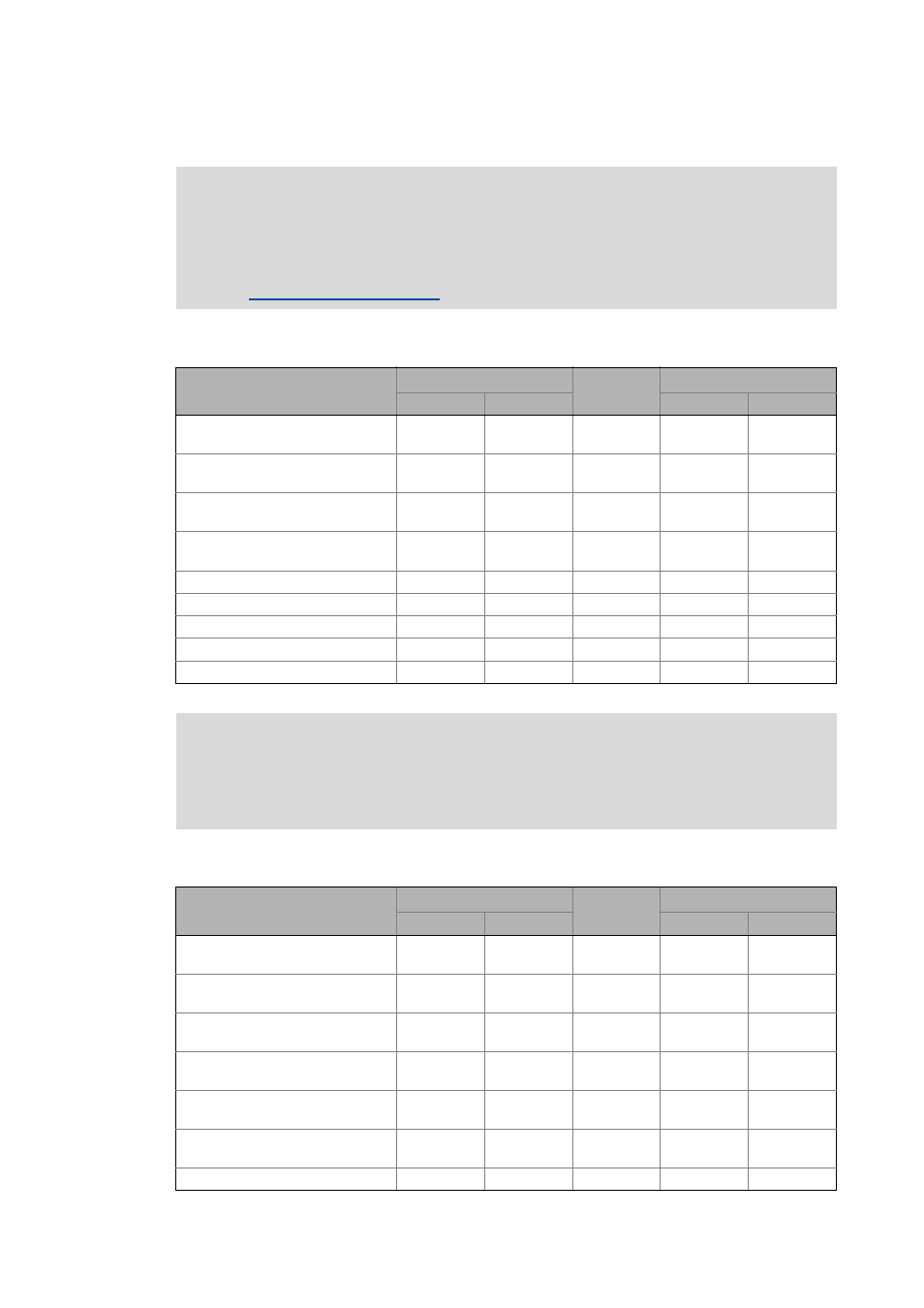
Data mapping of the output assemblies
Data mapping of the input assemblies
Note!
In order to be able to use the torque control for the assembly object instances 22 (0x16),
23 (0x17), 72 (0x48), 73 (0x49), the "DriveMode" attribute has to be written by means of
explicit message transfer.
Data component
[Bits 0 ... 7]
Class
Instance
Number
Attribute
Name
Number
Name
Number
RunFwd [Bit 0]
Control
Supervisor
0x29
1
Run1
3
RunRev [Bit 1]
Control
Supervisor
0x29
1
Run2
4
FaultReset [Bit 2]
Control
Supervisor
0x29
1
FaultRst
12
NetCtrl [Bit 5]
Control
Supervisor
0x29
1
NetCtrl
5
NetRef [Bit 6]
AC Drive
0x2A
1
NetRef
4
Drive Mode [Bits 0 ... 7]
AC Drive
0x2A
1
DriveMode
6
Speed Reference [Bits 0 ... 7]
AC Drive
0x2A
1
SpeedRef
8
Torque Reference [Bits 0 ... 7]
AC Drive
0x2A
1
TorqueRef
12
Custom Output [Bits 0 ... 7]
Note!
In case of the assembly object instances 21 (0x15) und 23 (0x17), NetCtrl (Bit 5) and
NetRef (Bit 6) must be set in order that the inverter can receive start/stop commands
and speed/torque commands via the network.
Data component
[Bits 0 ... 7]
Class
Instance
Number
Attribute
Name
Number
Name
Number
Faulted [Bit 0]
Control
Supervisor
0x29
1
Faulted
10
Warning [Bit 1]
Control
Supervisor
0x29
1
Warning
11
Running1 (Fwd) [Bit 2]
Control
Supervisor
0x29
1
Running1
7
Running2 (Rev) [Bit 3]
Control
Supervisor
0x29
1
Running2
8
Ready [Bit 4]
Control
Supervisor
0x29
1
Ready
9
CtrlFromNet [Bit 5]
Control
Supervisor
0x29
1
CtrlFromNet
15
RefFromNet [Bit 6]
AC Drive
0x2A
1
RefFromNet
29