NORD Drivesystems BU0510 User Manual
Page 65
BU 0510 GB-3911
Subject to technical alterations
65
6.6.2
Master switch-off on slave error or position slip error
With a master
– slave coupling errors in the master are automatically dealt with by communication of the
position to the slave. Therefore, if the master stops in case of a fault or cannot follow its ramp, the slave also
moves to this position.
However, if the slave cannot follow the specified position, or the slave has a fault, a reaction by the master is
necessary. This can be either via a higher level control unit or by implementing a second communication
channel between the slave and the master. For this, the slave inverter sends a "Position reached" bit and/or
"Error" as BUS IO Bit to the master, which perceives these as an emergency stop or customer error. According
to the programming, the master either stops (emergency stop) or changes to "Error" status and switches off.
Example:
If the slave device changes to the operating status "Error" the master also immediately changes to the
operating status "Error".
The master device stops if the slip error limit is exceeded. The master can only be re-enabled if the
slave device is within the specified tolerance.
The following setting are required in order to set up the second communication channel:
Master device settings:
P426
=
P103 Master
braking time on slave error
P460
=
0
Watchdog time = 0 => "Customer error"
P480[-01]
=
18
Watchdog
P480[-02]
=
11
Emergency stop
P510[-02]
=
09
CAN broadcast or
10
CANopen broadcast
P546
=
17
Bus - IO In Bits 0-7
Slave device settings:
P481[-01]
=
7
Fault
P481[-02]
=
21
Position reached
P502[-01]
=
12
BusIO Out Bits 0-7
P502[-02]
=
15
Actual position, increment High word
P502[-03]
=
10
Actual position, increment Low word
13
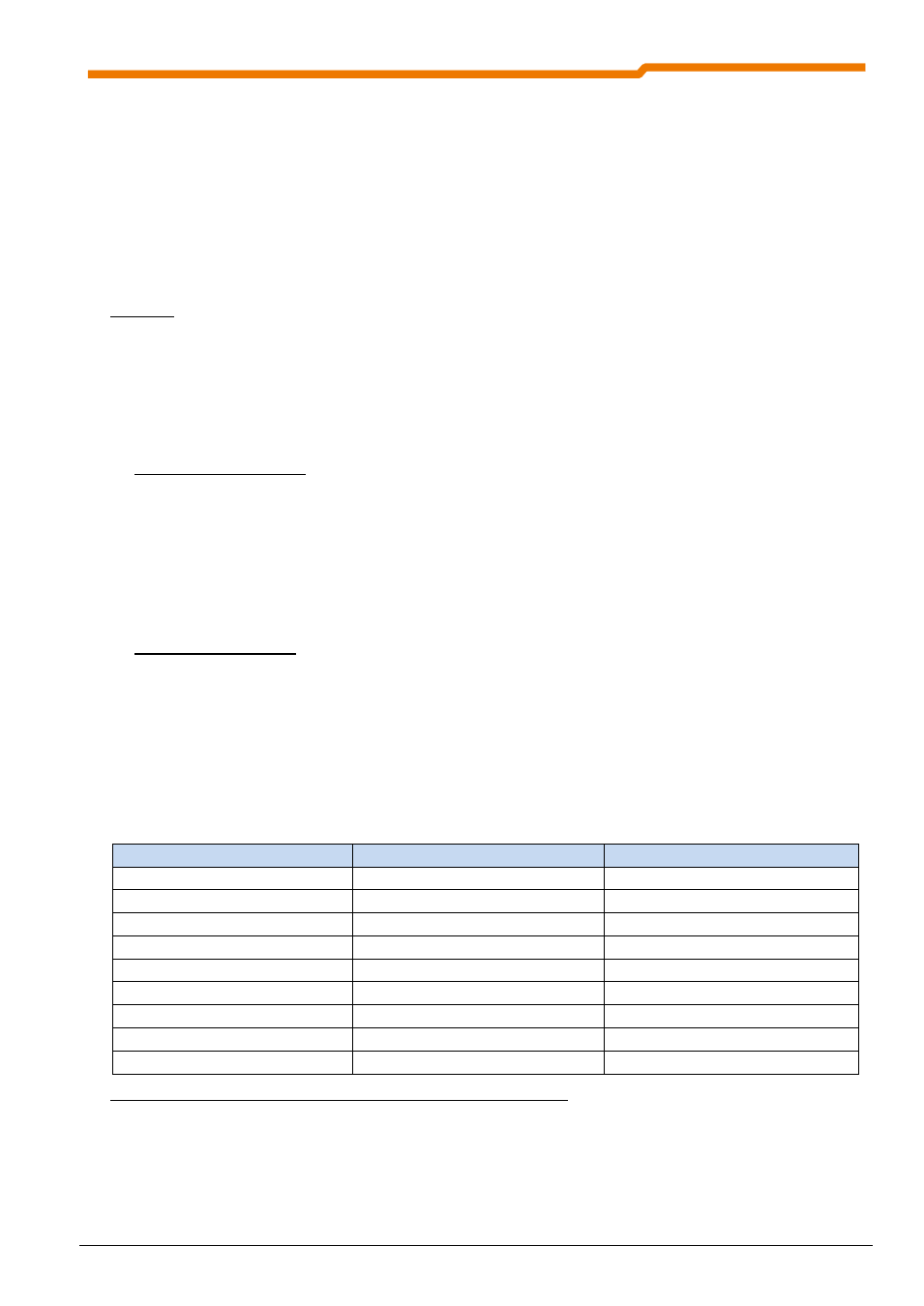
In order for a second communication channel to be set up between the master and the slave, the CAN
addresses of the devices must be selected so that transmission is not on the same identifier. The identifier on
which the CAN master function is transmitted depends on the CAN addresses which are set (P515[-01]).
P515 [-01] CAN address
Broadcast identifier
Accessed slave device
0 … 127
1032
0
– 255
128, 136, 144, 152, …, 240, 248
1024
0
– 31
129, 137, 145, 153, …, 241, 249
1025
32
– 63
130, 138, 146, 154, …, 242, 250
1026
64
– 95
131, 139, 147, 155, …, 243, 251
1027
96
– 127
132, 140, 148, 156, …, 244, 252
1028
128
– 159
133, 141, 149, 1
57, …, 245, 253
1029
160
– 191
134, 142, 150, 158, …, 246, 254
1030
192
– 223
135, 143, 151, 159, …, 247, 255
1031
224
– 255
Table 18: Master / Slave communication: assignment of addresses
Possible variants : P515
Master
= 0; P515
Slave
= 128;