NORD Drivesystems BU0510 User Manual
Page 27
3 Description of function
BU 0510 GB-3911
Subject to technical alterations
27
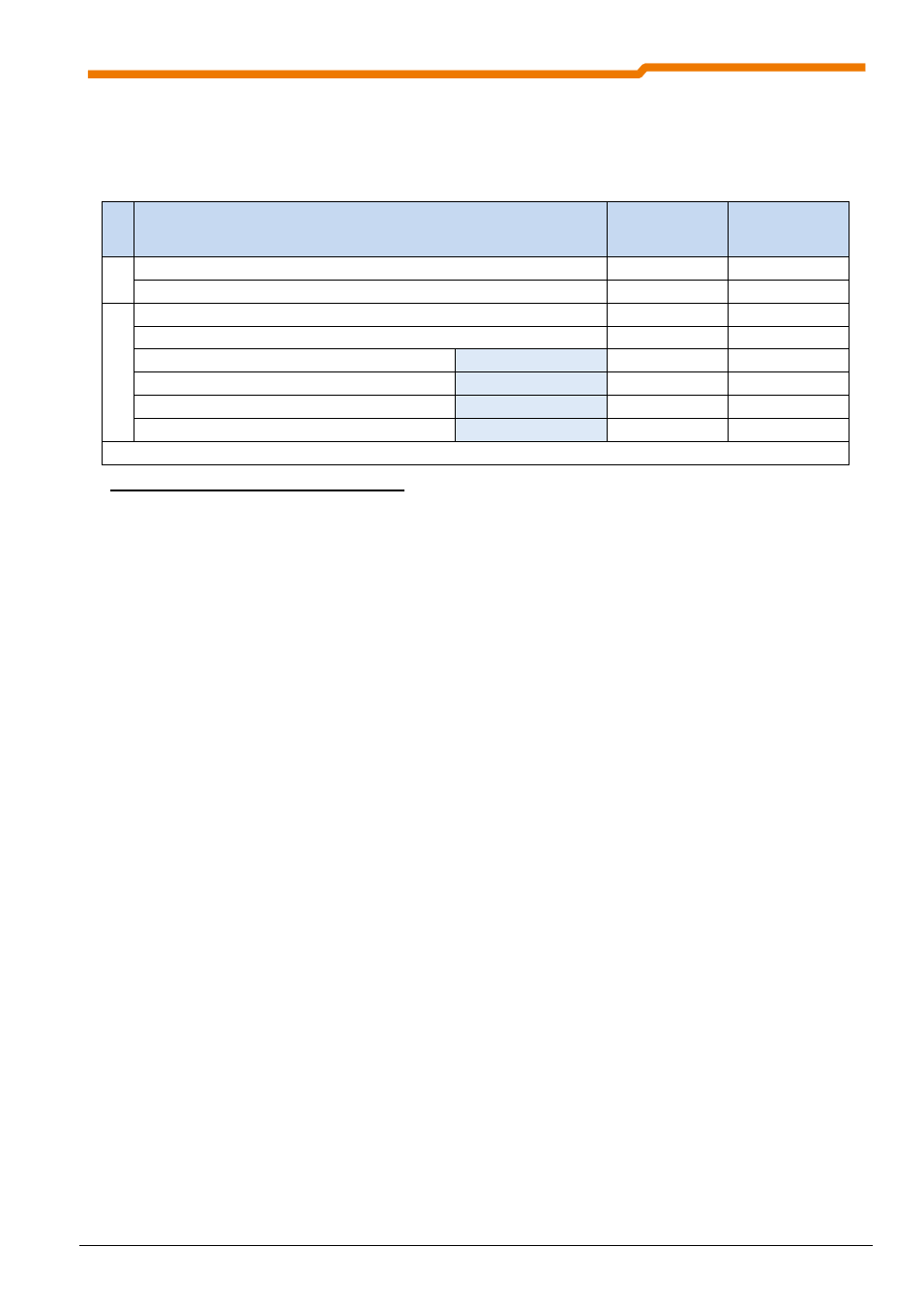
3.2.4
Positioning with absolute / incremental encoders in absolute mode
The encoder used for positioning is activated via parameter P604 "Encoder Type". Here, a differentiation is
made between normal measurement (for "linear" systems) and "path optimised" measurement (for circulating
systems).
Encoder type
Standard
distance
measurement
Path optimised
measurement
IG
Incremental
0
3
Incremental + save position
2
4
AG
CANopen absolute (with automatic configuration)*
1
5
CANopen absolute, manual (with manual configuration)
6
7
SSI
SK 540E and above
8
9
BISS
SK 540E and above
10
11
Hiperface
SK 540E and above
12
13
Endat 2.1
SK 540E and above
14
15
* Only CANopen encoders approved by NORD may be used with automatic configuration
Table 15: - P604 Selection of encoder type
In the function "Optimum Path" the multi-turn resolution of the encoder can be additionally limited for the
overflow point via parameter P615 "Maximum Position". The multiturn resolution in rotations (1 rotation =
1,000 rev) is entered in parameter P615. It is also possible to enter a non-integer value of rotations (for
example see Section 3.2.4.2).
After the setting or selection of the encoder type in parameter P604 "Distance measuring system" the function
of the encoder can be tested via parameter P601 "Actual Position".