6 biss encoders, 3 canopen absolute encoders – NORD Drivesystems BU0510 User Manual
Page 17
2 Encoder connection
BU 0510 GB-3911
Subject to technical alterations
17
2.2.6
BISS encoders
(SK 540E and above)
BISS is a further development of the SSI interface, which also operates with 2 RS485 channels. With BISS
encoders, the position is communicated together with a checksum. This provides more reliable
communication than SSI.
The encoders are also available with an integrated incremental track.
The supply voltage for the encoder is 10-30V. The voltage source can be an external source or the internal
voltage (according to the frequency inverter version: 12V /15V /24V).
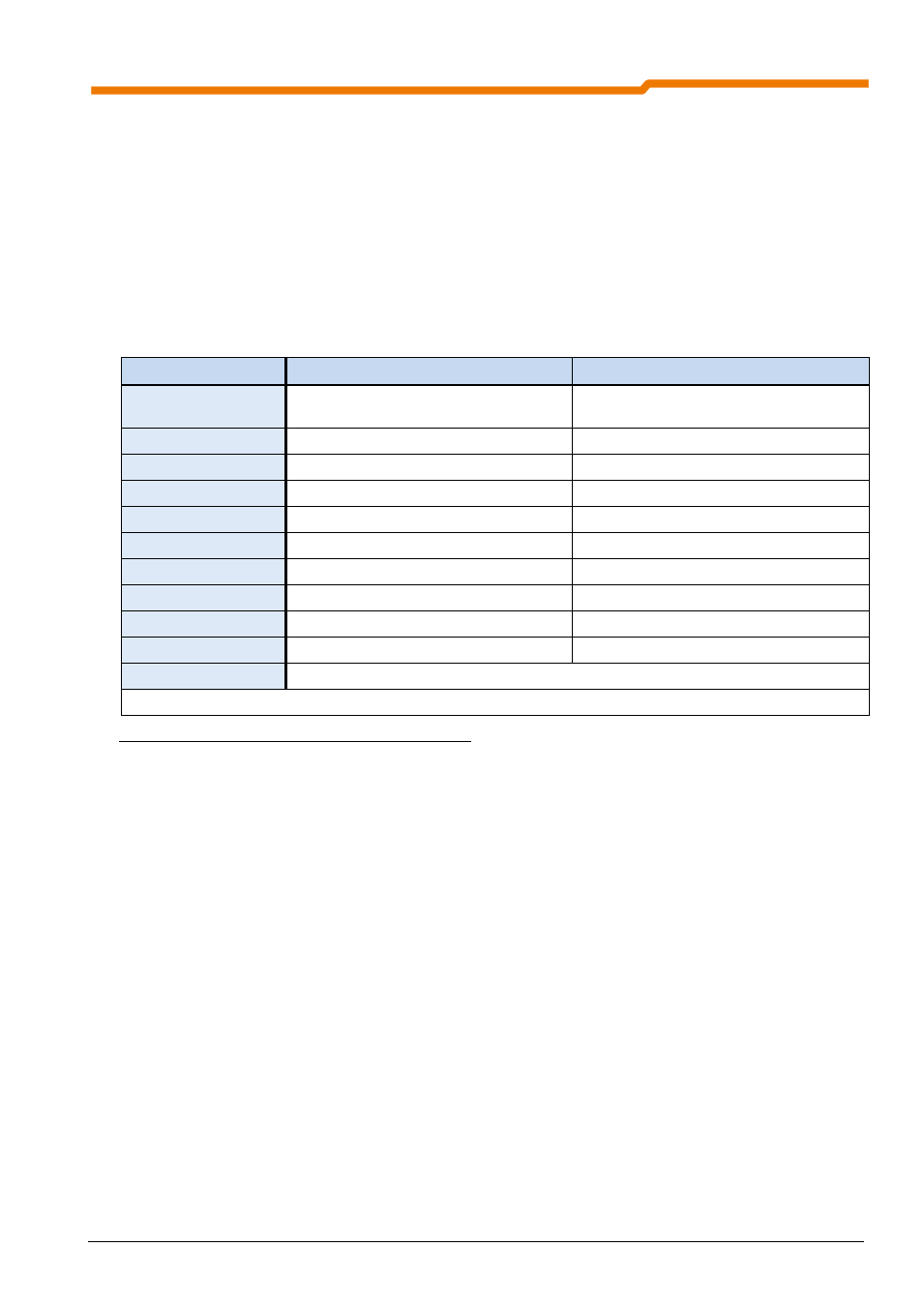
Function
Cable colours for BISS encoders*
Assignment for SK 54xE
10-30V supply
brown
X5:42( /X5:44 /X6:49)
15V ( /24V /12V)
0V supply
white
X5:40 GND/0V
Track A
black
X6:51 ENC A+
Track A inverse
violet
X6:52 ENC A-
Track B
grey/pink
X6:53 ENC B+
Track B inverse
red/blue
X6:54 ENC B+
Clock +
green
X14:63 CLK +
Clock -
yellow
X14:64 CLK-
Data + (RS485)
grey
X14:65 DAT +
Data - (RS485)
pink
X14:66 DAT -
Cable shield
connected to a large area of the frequency inverter housing or shielding angle
* E.g. Kübler 5883
Table 8: Connection assignment for BISS encoders
2.3 CANopen absolute encoders
The connection of an absolute encoder to the SK 53xE / SK 54xE is carried out via the internal CANopen
interface. As a minimum requirement, the absolute encoder to be connected must have a CAN Bus interface
with CANopen protocol. The internal CAN Bus with CANopen protocol can be used for simultaneous control
and parameterisation as well as the readout of the absolute encoder position.
The SK 53xE / SK 54xE supports CANopen absolute encoders with the communication profile DS 406. If an
absolute encoder supplied by Getriebebau Nord GmbH & Co. KG is used, automatic parameterisation of the
absolute encoder via the frequency inverter is possible. Only the CAN address and the baud rate of the
encoder still need to be set with the rotary or dip switches on the encoder. All other necessary parameters
are set by the frequency inverter via the CAN Bus in the encoder.