NORD Drivesystems BU0280 User Manual
Page 44
Supplementary Manual DeviceNet for NORDAC SK 200E
44
Subject to technical amendments
BU 0280 GB
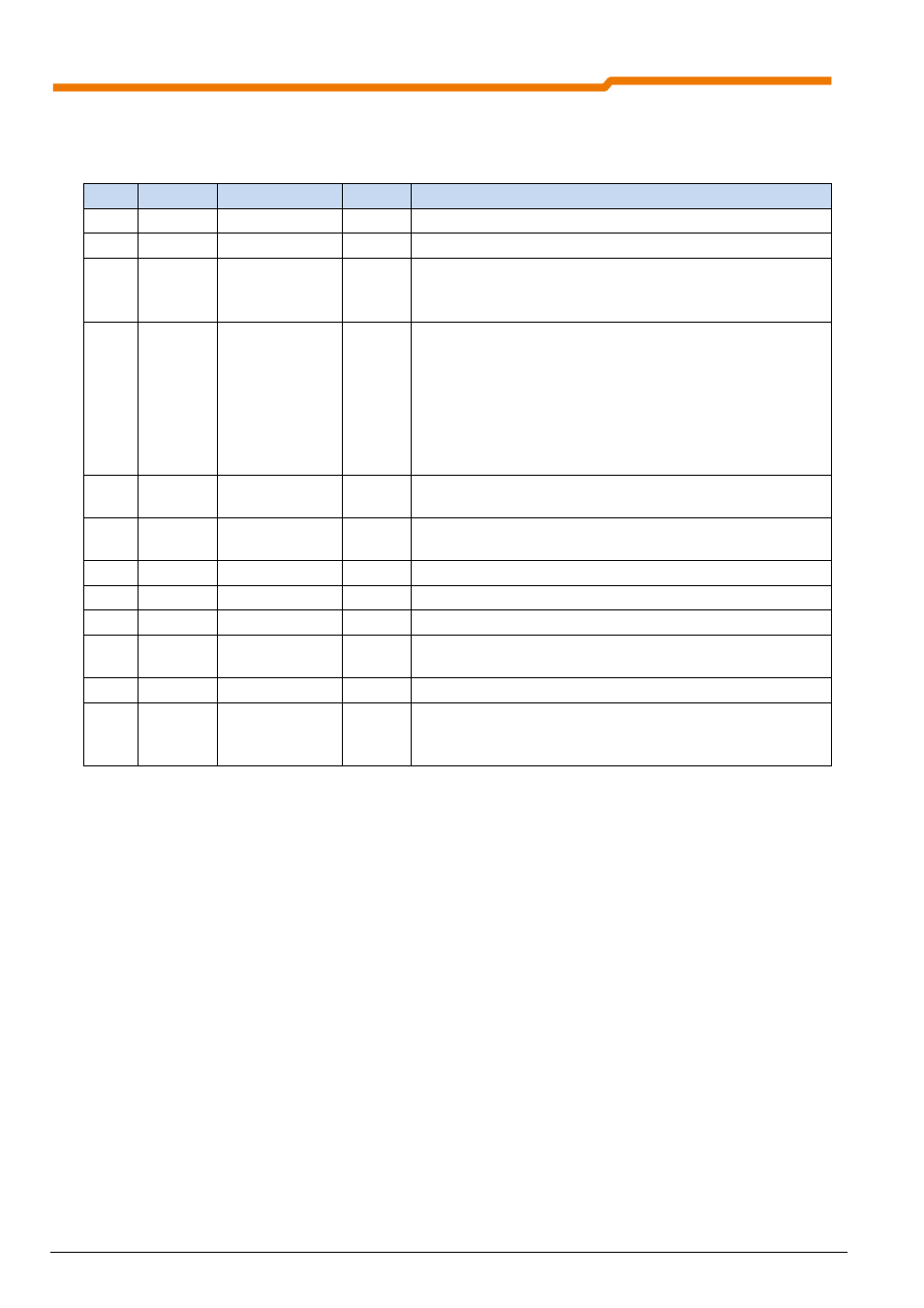
4.3.6
Class 41 – Control Supervisor Object
Attr.
Access
Name
Type
Description
3
Set
Run Fwd
BOOL
Starts / stops the motor clockwise direction
4
Set
Run Rev
BOOL
Starts / stops the motor anticlockwise direction
5 Set NetCtrl
BOOL
Determines
the validity of Run1 & Run2
1 = Control via DeviceNet
0 = Control via DeviceNet invalid
6 Get State
USINT
FI
status
1 = Start
2 = Not Ready
3 = Ready
4 = Enabled
5 = Stopping
6 = Fault_Stop
7 = Faulted
7 Get Running1 BOOL
If True, the FI is enabled via Run1 or it is in “Fault_Stop”
mode and is braking in a clockwise direction.
8 Get Running2 BOOL
If TRUE, the FI is enabled via Run1 or it is in “Fault_Stop”
mode and is braking in an anticlockwise direction.
9
Get
Ready
BOOL
If TRUE, the FI is in status “Ready” or “Enabled”.
10
Get
Faulted
BOOL
If TRUE, the relevant FI is in a faulted condition.
11 Get Warning
BOOL
TRUE
indicates that there is a warning for the relevant FI.
12 Set
FaultRst
BOOL
An error present in the FI is deleted with a flank from
FALSE to TRUE.
13 Get FaultCode
UINT Displays
the
current or last active error code.
15
Get
CtrFromNet
BOOL
Determines the validity of Run1 & Run2
1 = Control via DeviceNet
0 = Control via DeviceNet invalid
In Class 41, Instances 1 to 4 are supported, whereby the value of the instance is addressed to the relevant FI
on the system bus. E.g. FI 2 on the system bus is accessed via Instance 2.