Operation, 9 proportional integral derivative block (pid) – KROHNE H250 M40 FOUNDATION FIELDBUS User Manual
Page 59
OPERATION
4
59
H250 M40
www.krohne.com
02/2014 - 4001208201 - AD H250 M40 FF R02 en
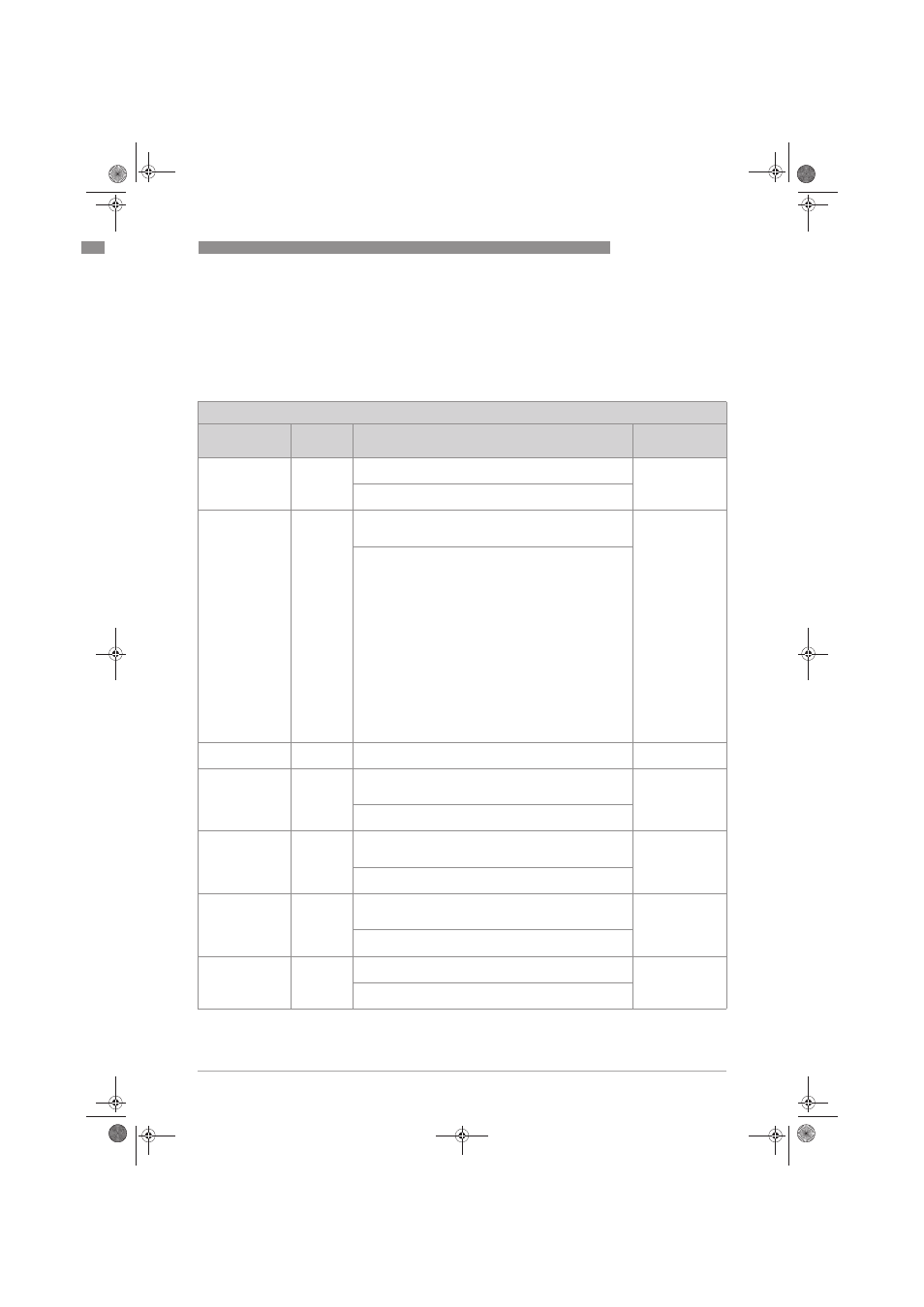
4.9 Proportional Integral Derivative Block (PID)
The following tables list the PID Block parameters in alphabetical order.
The following tables contain short parameter description, factory settings (Initial Value (IV)) and
possible settings.
Proportional Integral Derivative Block
Parameter
DD Name
Access
Description
settings
Initial Value
ALERT_KEY
ALERT_KEY
ALERT_KEY
ALERT_KEY
Alert Key
Alert Key
Alert Key
Alert Key
RW
The identification number of the plant unit. This information
may be used in the host for sorting alarms, etc.
1
Setting:
1...255
BLOCK_ERR
BLOCK_ERR
BLOCK_ERR
BLOCK_ERR
Block Error
Block Error
Block Error
Block Error
R
This parameter reflects the error status associated with the
hardware or software components associated with a block. It
is a bit string, so that multiple errors may be shown.
Current Block
Error
Setting:
•
Other: Non-specific error active
•
Block Configuration: Error detected in block configuration
•
Simulation Active: Simulation enabled in this block
•
Local Override: Output tracking of faultstate active
•
Device Fault State: Device faultstate set
•
Device Maintenance: Device needs maintenance soon
•
Input Failure: Process variable has bad status
•
Output Failure: Failure detected in output hardware
•
Memory Failure: Memory error detected
•
Lost Static Data: Static parameters cannot be recovered
•
Lost NV Data: Non-volatile parameters cannot be recovered
•
Readback Check: Failure detected in READBACK
•
Maintenance Needed: Device NEEDS maintenance NOW
•
Power Up: Recovery from power failure
•
Out Of Service: Block actual mode is out of service
MODE_BLK
MODE_BLK
MODE_BLK
MODE_BLK
Block Mode
Block Mode
Block Mode
Block Mode
The actual, target, permitted and normal modes of the block.
TARGET
Target
RW
This is the mode requested by the operator. Only one mode
from those allowed by the permitted mode parameter may be
requested.
OOS
Setting:
ROut / RCas / Cas / Auto / Man / OOS
ACTUAL
Actual
R
This is the current mode of the block, which may differ from
the target based on operating conditions. Its value is
calculated as part of block execution.
Actual mode
Setting:
ROut / RCas / Cas / Auto / Man / OOS
PERMITTED
Permitted
RW
Defines the modes which are allowed for an instance of the
block. The permitted mode is configured based on application
requirement.
ROut, RCas, Cas,
Auto, Man or OOS
Setting:
ROut / RCas / Cas / Auto / Man / OOS
NORMAL
Normal
RW
This is the mode the block should be set to during normal
operating conditions.
Auto
Setting:
Auto
AD_H250_M40_FF_R02_en_4001208201_PRT.book Page 59 Friday, February 21, 2014 11:25 AM