Setting the modbus master, Setting the modbus master -29, Index – Yokogawa Data Acquisition with PID Control CX2000 User Manual
Page 41
2-29
IM04L41B01-65EN
1
2
3
4
Index
Viewing and Creating Setup Data
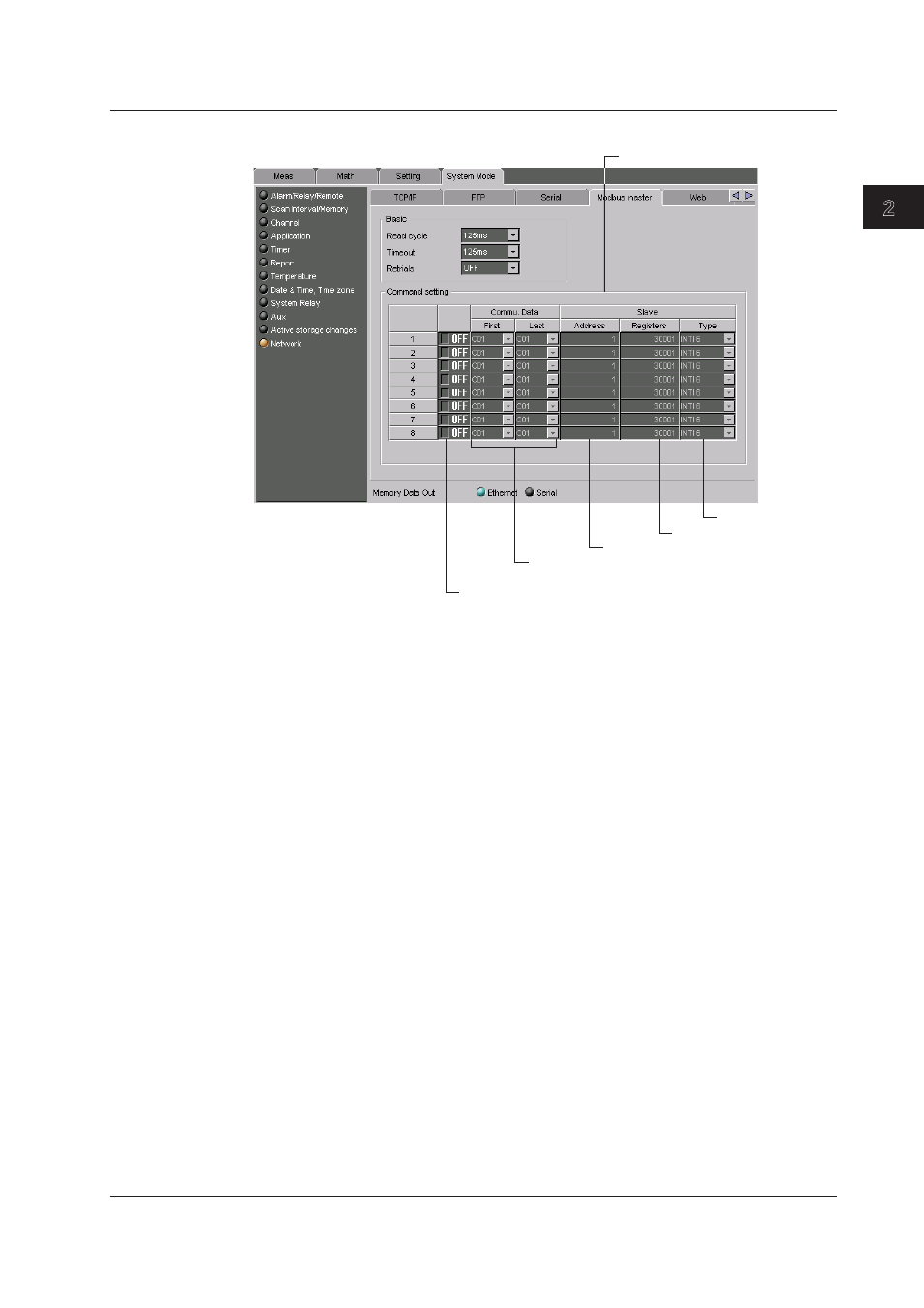
Setting the Modbus Master
Set the command.
Data type
Select whether or not use command.
Register No. (slave device)
Address (slave device)
Communication input data (DX100P: C01 to C12,
DX200P: C01 to C30)
• Basic
Read cycle: The cycle at which data is read from other devices. Select the read cycle
from [125 ms], [250 ms], [500 ms], [1 s], [5 s], [2 s], or [10 s]
Timeout: Specify a time period that the DXP waits for a response from the specified
slave device after transmitting a command. Select the timeout time from [125 ms], [250
ms], [500 ms], [1 s], [5 s], [2 s], [10 s], or [1 min].
Retrials: The number of times to retransmit the command when there is no response
from the specified slave device. Select the number of retrials from [Off] (0), [1], [2], [3],
[4], [5], [10] or [20].
• Type
• INT16: 16-bit signed integer
• UINT16: 16-bit unsigned integer
• INT32_B: “32-bit signed integer” is assigned to the Modbus register in the order
upper 16 bits followed by the lower 16 bits.
• INT32_L: “32-bit signed integer” is assigned to the Modbus register in the order
lower 16 bits followed by the upper 16 bits.
• UINT32_B: “32-bit unsigned integer” is assigned to the Modbus register in the order
upper 16 bits followed by the lower 16 bits.
• UINT32_L: “32-bit unsigned integer” is assigned to the Modbus register in the order
lower 16 bits followed by the upper 16 bits.
• FLOAT_B: “32-bit floating-point data” is assigned to the Modbus register in the
order upper 16 bits followed by the lower 16 bits.
• FLOAT_L: “32-bit floating-point data” is assigned to the Modbus register in the
order lower 16 bits followed by the upper 16 bits.
2.6 Configuring the System Mode