Data number 51~54, 60 & 61 – FEC DSP1500 (SAN3) User Manual
Page 105
PAGE 6-43
enFORCE
Operation Manual
¾
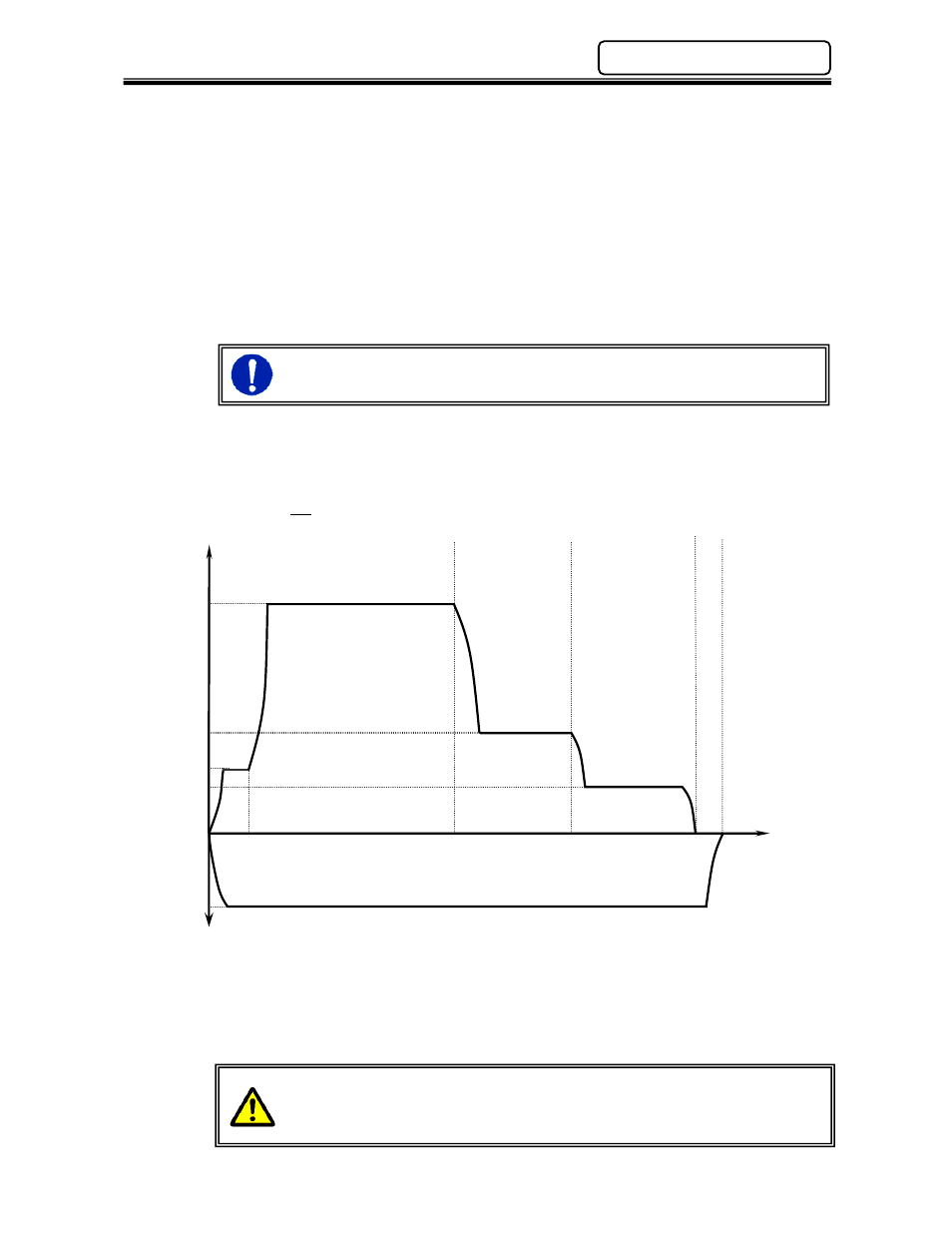
Data Number 51 - Freerun Speed
Higher speed value used for the “no-load” portion of the press operation. The press will
run at this speed until [60: Freerun Distance], [24: Crossover Distance] or [14: Speed
Change Load] is reached.
Begins after [40: Initial Time] has passed.
¾
Data Number 52 - Slowdown Speed
Slower speed value used to approach the part. The press will run at this speed until
[24: Crossover Distance] or [14: Speed Change Load] is reached.
Begins after [60: Freerun Distance] is reached.
¾
Data Number 53 - Load Speed
Slowest speed value used for the “load” portion of the press operation.
Begins after [24: Crossover Distance] or [14: Speed Change Load] is reached.
If [14: Speed Change Load] is larger than [15: 1
ST
Load] the press will switch
to [53: Load Speed] at [15: 1
ST
Load].
¾
Data Number 54 - Return Speed
Return operation speed.
¾
Data Number 60 - Free Run Distance
The distance of Freerun Speed operation. This distance is measured from [62: Return
Position], not from end of [40: Initial Time].
¾
Data Number 61 - Recovery Time
The press will hold the [13: Standard Load] or [22: Standard Distance] for the amount
of time set.
If 999.9 (1 figure below the decimal) or 9999 (no decimal point) is set, recovery time is
set to no limitation. It finishes operating when the START signal goes OFF.
If using the “Advanced” signal, a time must be set. The “Advanced” signal will stay on for
this set time.
The set time for “F-type” tools should generally be kept to 1 second or
less unless duty cycle calculations have been done and the tool is
oversized for the application. If it is set and operated over 1 second,
abnormal 8-10 (overload abnormal) may occur.
Speed
[20]
Freerun Distance
[54]
Recovery
Time
[50] Initial Speed
[42] Crossover Distance
Or
[14] Speed Change Load
[40]
Initial Time
[22]
Standard
Distance
Or
[13] Load
[53] Load Speed
[52] Slowdown
Speed
[41] Freerun
Speed
[53] Return Speed
Time/
Distance
Chapter 6: System Operation