Yaskawa CIMR-PUxA User Manual
Page 141
Parameters related to Speed Search are set
incorrectly
• Check values set to Speed Search related parameters.
• Adjust the Speed Search current and Speed Search deceleration times (b3-02 and b3-03 respectively).
• After Auto-Tuning, set b3-24 to 1 to enable Speed Estimation Speed Search.
Output current fluctuation due to power
supply loss
Check the power supply for phase loss.
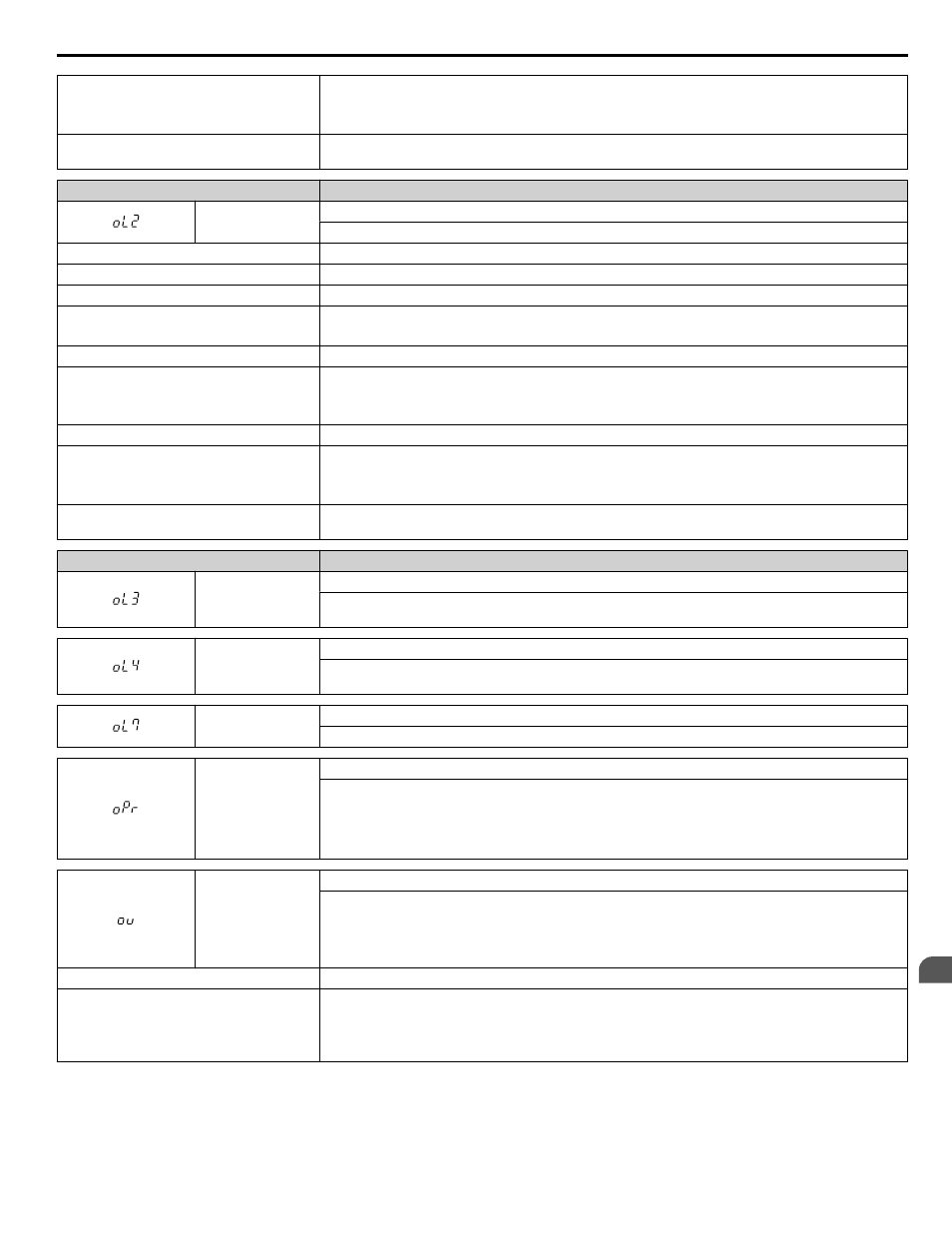
Digital Operator Display
Fault Name
oL2
Drive Overload
The thermal sensor of the drive triggered overload protection.
Cause
Possible Solution
Load is too heavy
Reduce the load.
Acceleration or deceleration time is too short Increase the settings for the acceleration and deceleration times (C1-01 through C1-04).
The output voltage is too high
• Adjust the preset V/f pattern (E1-04 through E1-10) by reducing E1-08 and E1-10.
• Do not lower E1-08 and E1-10 excessively. This reduces load tolerance at low speeds.
Drive capacity is too small
Replace the drive with a larger model.
Overload occurred when operating at low
speeds
• Reduce the load when operating at low speeds.
• Replace the drive with a model that is one frame size larger.
• Lower the carrier frequency (C6-02).
Excessive torque compensation
Reduce the torque compensation gain in parameter C4-01 until there is no speed loss but less current.
Parameters related to Speed Search are set
incorrectly
• Check the settings for all Speed Search related parameters.
• Adjust the current used during Speed Search (b3-03) and the Speed Search deceleration time (b3-02).
• After Auto-Tuning, set b3-24 to 1 to enable Speed Estimation Speed Search.
Output current fluctuation due to input phase
loss
Check the power supply for phase loss.
Digital Operator Display
Fault Name
oL3
Overtorque Detection 1
The current has exceeded the value set for torque detection (L6-02) for longer than the allowable time
(L6-03).
oL4
Overtorque Detection 2
The current has exceeded the value set for Overtorque Detection 2 (L6-05) for longer than the allowable
time (L6-06).
oL7
High Slip Braking oL
The output frequency stayed constant for longer than the time set to n3-04 during High Slip Braking.
oPr
External Digital Operator Connection Fault
The external operator has been disconnected from the drive.
Note:
An oPr fault will occur when all of the following conditions are true:
• Output is interrupted when the operator is disconnected (o2-06 = 1).
• The Run command is assigned to the operator (b1-02 = 0 and LOCAL has been selected).
ov
Overvoltage
Voltage in the DC bus has exceeded the overvoltage detection level.
• For 200 V class drives: approximately 410 V
• For 400 V class drives: approximately 820 V (740 V when E1-01 is less than 400)
• For 600 V class drives: approximately 1040 V
Cause
Possible Solution
Deceleration time is too short and regenerative
energy is flowing from the motor into the drive
• Increase the deceleration time (C1-02 and C1-04).
• Install a dynamic braking resistor or a dynamic braking resistor unit.
• Set L3-04 to 1 to enable stall prevention during deceleration. Stall Prevention is enabled as the default
setting.
5.2 Fault Detection
YASKAWA ELECTRIC TOEP YAIP1U 01B YASKAWA AC Drive - P1000 Quick Start Guide
141
5
Troubleshooting