Figure 3.11 – discrete output function block, Invert 0 not inverted 1 invert – Flowserve MX/QX Profibus DP/PA Field Unit User Manual
Page 51
51
PB DPV1 / PA Field Unit Installation and Maintenance FCD LMENIM2336-03 – 12/12
flowserve.com
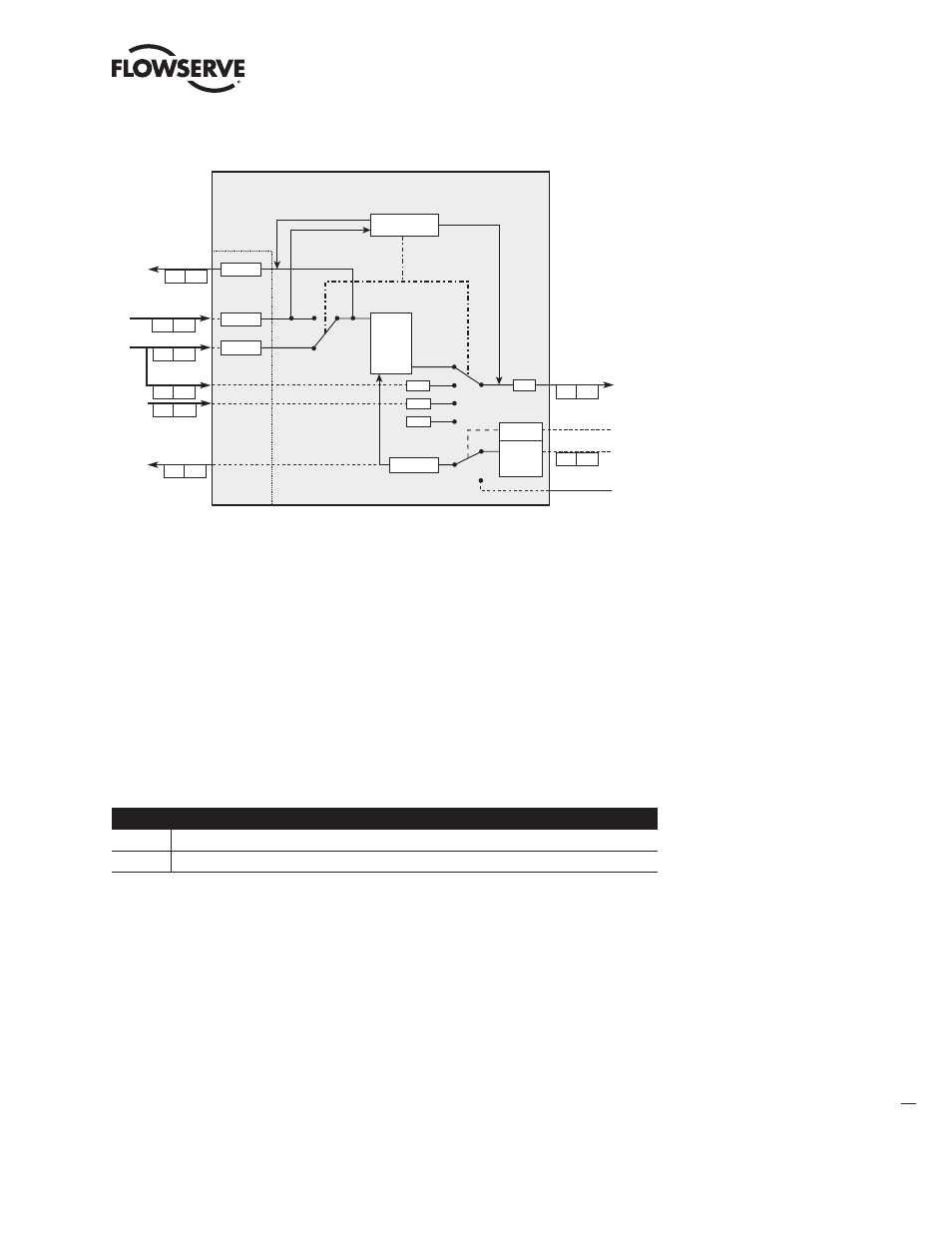
Figure 3.11 – Discrete Output Function Block
Discrete Output Function Block Various
Configuration Parameters (Acyclic)
Value Status
Value Status
Value Status
Value Status
On
Value Status
MODE- and STATUS-
Handling
OUT_D
RCas Auto
Simulate
Parameter
Command to
Actuator Hardware
Status
Enable
Simulate
Valve and
Status
OUT_D
OUT_D
OUT_D
Off
Man
LO
O/S
Value Status
FB
Algorithm
Value Status
RCAS_OUT_D
READBACK_D
SP_D
RCas
Auto
SP_D
RCAS_IN_D
Status
Configuration Parameter
Configuration Parameter
from Transducer
To
Network
User
To
Network
User
Configuration
Parameter
Cyclic
Process
Data
Cyclic Process
Data Parameter
From
Network
User
Value Status
Status
To Transducer
(Channel)
To set the DO block output command to the actuator, the operator first sets the mode of the block
to define how the block obtains its output. In Auto mode, the setpoint is written to the block output.
In Manual mode, the operator enters the Output directly using a configuration tool. In the Remote
Cascade mode, the setpoint is determined by a host computer (Remote Station) that writes to the
RCAS_IN_D input.
Inputs
RCAS_IN_D (cyclic) is the target setpoint and status provided by a supervisory host to the discrete
output block used in MODE RCAS.
SP_D (cyclic) is the Setpoint of the function block used in MODE AUTO.
INVERT (acyclic) indicates whether the SP_D should be logically inverted before writing to OUT_D in
mode AUTO or RCAS.
INVERT
0
Not inverted
1
Invert
Outputs
The output of the function block and can be set in three ways. When the block is in Manual Mode,
the output can be set by the user with a configuration tool. The setpoint parameter is ignored during
Manual Mode. In Automatic Mode, the output is set by the Setpoint value in engineering units. In
Remote Cascade Mode, the setpoint comes from a remote computer/station. OUT_D is sent to the
Transducer Block where some action will be taken to control the actuator hardware.
RCAS_OUT_D (cyclic) is the function block setpoint and status provided to a supervisory host for
monitoring/back calculation and to allow action to be taken under limited conditions or mode change.
CHECK_BACK_D (cyclic) contains detailed information of the device, bitwise coded. More than one
message is possible at once.