7 advanced functions, 1 two-coordinate measurements (2d) – Bowers Group Trimos Vectra Height Gauges User Manual
Page 19
750 50 0002 03
19
7 Advanced functions
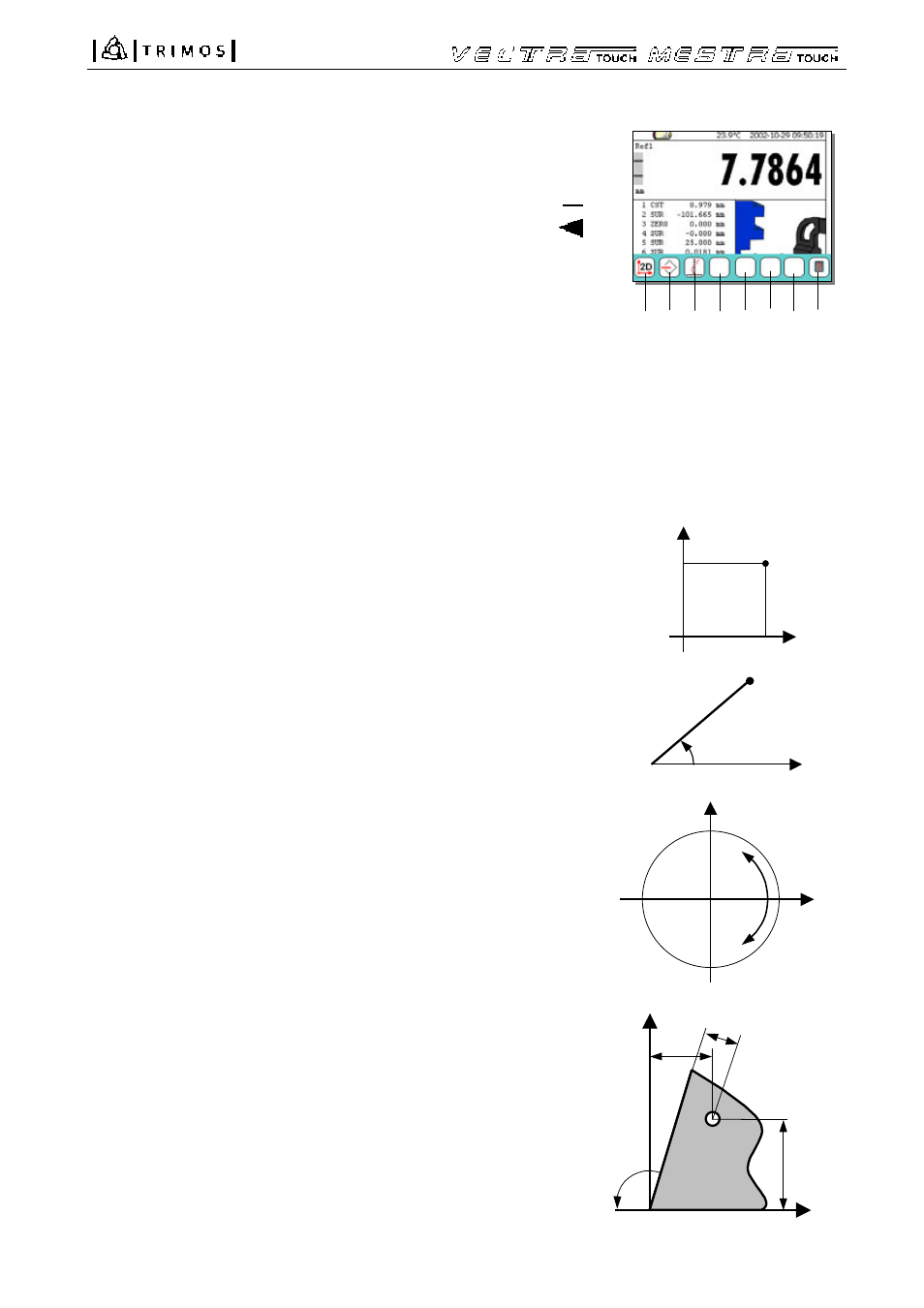
To open the "advanced" menu, press the corresponding
symbol in the function menu.
The available functions are the following:
a) Two-coordinate measurements
b) Memorizing of the buffer contents
c) Graphic display of the squareness deviation
d) not in use
e) not in use
f) not in use
g) not in use
h) Memory status
7.1 Two-coordinate measurements (2D)
7.1.1 Definition
Application
This function allows the measurement in two coordinates of various parts
having polar and cartesian features. The centerline position of
bores/axes will be determined and displayed according to a referential
coordinate system.
Cartesian coordinate system
This system consists of 2 axes, X and Y over 90°. The measured values
are specified as coordinates according to X and Y.
The reference axe is the X axe.
Polar coordinate system
This system consists of an angle α in relation to polar axes X and a
radius R. Positive direction = counter-clockwise.
The measured values are specified as coordinates according to R and α.
Convention for angle values
The used convention for angle values are as shown by the trigonometric
circle (at the right side) :
Angles are displayed by default from 0° to 180° (0 to
π rad) for quarters
1 and 2 and from 0° to -180° (0 to -
π rad) for quarters 3 and 4.
Rotation of the component
After having performed the measurements in Y axes, the component
must be rotated counter-clockwise to complete the measurements in X
axes. The rotation angle
α may be situated between 45° and 135°.
The schematics at the right side shows Y
m
and X
m
as values measured
before and/or after rotation. Y
c
and X
c
present the values related to a
cartesian coordinate system at 90°. These values will be taken into
consideration for calculations and stored in the buffer.
Y
X
(X; Y)
X
α
R
(R; α)
1
180°
-180°
-90°
0°
+
-
2
3 4
90°
X
m
X
c
Y
c
=Y
m
α
a b c d e f g h