Build and download – Rockwell Automation 2080 Micro800 Digital and Analog Plug-in Modules User Manual
Page 96
88
Rockwell Automation Publication 2080-UM004B-EN-E - December 2013
Appendix B Quickstart
Build and Download
Build and download the program into the controller.
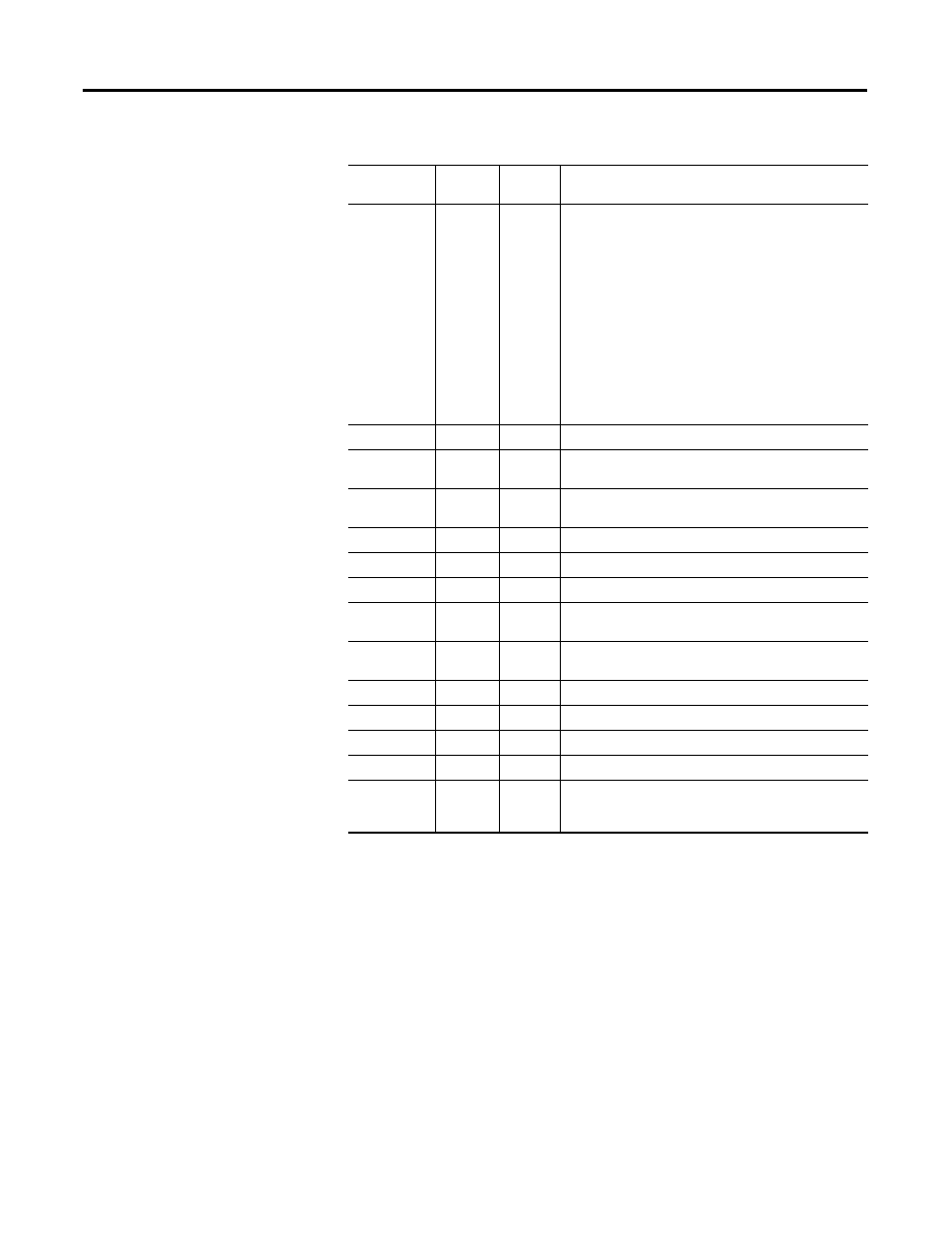
NoiseFilter
INPUT
USINT
00 - No filter
01 - 250 kHz
02 - 200 kHz
03 - 80 kHz
04 - 40 kHz
05 - 13.3 kHz
06 - 10 kHz
07 - 4 kHz
08 - 2 kHz
09 - 1 kHz
10 - 500 Hz
11 - 250 Hz
12 - 125 Hz
13 - 62.5 Hz
14 - 31.25 Hz
EncMode
INPUT
USINT
Encoder Mode. 1-X1, 2- X2, 4-X4.
ECntPerRev
INPUT
REAL
User input to indicate how many X1 counts will be
generated when Encoder disk turns one revolution.
TrvPerRev
INPUT
REAL
The actual distance travelled when motor turns one
revolution.
Start
INPUT
BOOL
Start counter.
Stop
INPUT
BOOL
Stop the counter and clear MaxDPos and MaxDSpd value
FBENO
OUTPUT
BOOL
Function block enable output.
IDCheck
OUTPUT
BOOL
TRUE: HSC plug-in is at selected slot.
FALSE: Wrong plug-in or no plug-in at selected slot.
Initialized
OUTPUT
BOOL
TRUE: Indicates HSC initialization has finished.
FALSE: Indicates HSC initialization has not finished.
CurrentPos
OUTPUT
REAL
Current position.
CurrentSpd
OUTPUT
REAL
Current speed (Unit = user distance per second).
Accumulator
OUTPUT
LINT
Accumulator value.
TpPosition
OUTPUT
REAL
Position recorded when the latest touch probe is triggered.
Direction
OUTPUT
SINT
1 = Forward
-1 = Reverse
0 = Not moving
Input and Output Parameters
Parameter
Type
Data
Type
Description