Wesley BC-620-4CA User Manual
Page 65
Curtis 1234/36/38 Manual,
OS
11
61
2 3 J U LY 2 0 0 8 D R A F T
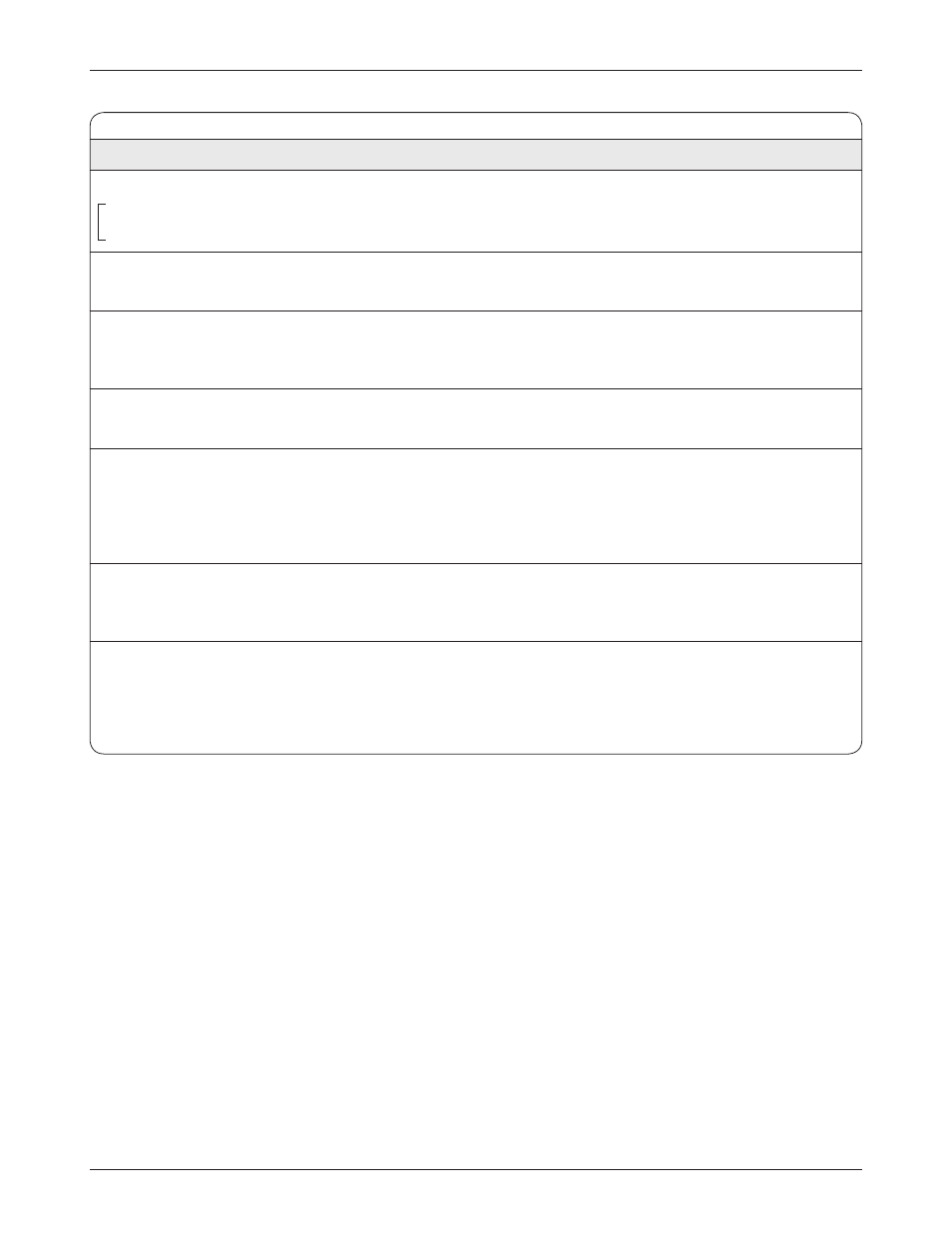
3 — PROGRAMMABLE PARAMETERS:
CAN Interface Parameters
CAN INTERFACE MENU
ALLOWABLE
PARAMETER
RANGE
DESCRIPTION
CANopen Interlock
On/Off
When programmed On, CAN NMT State must = 5 (operational state)
CANopen_Interlock_Enable
On/Off
in order for the interlock to be set; see Monitor
»
CAN Status menu, page 73.
OptionBits3 [Bit 2]
CAN Node ID
0–127
Sets the Node ID of the CANopen Slave system. The Node ID is the
CAN_Node_ID
0–127
first 7 bits of the 11-bit identifier (the COB ID).
Baud Rate
-3 – 2
Sets the CAN baud rate for the CANopen Slave system:
CAN_Baud_Rate
-3 – 2
-3=20Kbps, -2=50Kbps, -1=100Kbps,
0=125Kbps, 1=250Kbps, 2=500Kbps.
Heartbeat Rate
16–200 msec
Sets the rate at which the CAN heartbeat messages are sent from the
CANopen_Heart_Beat_Rate
4–50
CANopen Slave system.
PDO Timeout Period
0–200 msec
Sets the PDO timeout period for the CANopen Slave system. After the
CAN_PDO_Timeout_Period
0–50
slave controller has sent a PDO MISO, it will declare a PDO Timeout Fault
if the master controller has not sent a reply PDO MOSI message within the
set time. Either PDO1 MOSI or PDO2 MOSI will reset the timer. Setting the
PDO Timeout Period = 0 will disable this fault check.
Emergency Message Rate
16–200 msec
Sets the minimum rate between CAN emergency messages from the
CANopen_Emergency_
4–50
CANopen Slave system. This prevents quickly changing fault states from
Message_Rate
generating so many emergency messages that they flood the CAN bus.
Suppress CANopen Init
0–1
When Suppress CANopen Init is set = 1, at KSI On the initialization of the
Suppress_CANopen_Init
0–1
CANopen system is suppressed. Typically this is done so that the VCL
program can make changes to the CANopen system before enabling it (by
setting the variable Suppress_CANopen_Init = 0 and running the Setup_
CAN() function).