2 adjustment 1 – IAI America PDR-101-MW User Manual
Page 75
65
6.4.2 Adjustment
1
(1) The Host Controller is not Equipped with Acceleration/Deceleration Function or the
Input Pulse Frequency Changes Sharply
Set the “position command primary filter time constant.”
See (18) in Section 6.3.2.
It is possible to accelerate or decelerate smoothly even if the host controller is not equipped with
acceleration/deceleration function or the frequency of the pulse train changes sharply.
In case the host controller is not equipped with the acceleration/deceleration function or the frequency of
pulse train changes sharply, if the command value is input as is, the speed command changes sharply,
which may cause alarms such as “position deviation error” (alarm code: C6B) and “overload” (alarm code:
D0A).
Moreover, a large load is applied to the mechanical parts of the system including the actuator, which may
lead to system failure.
In such cases, use the “position command primary filter time constant” to perform smooth acceleration and
deceleration. (This function is also valid for command pulse signals that have taken
acceleration/deceleration into account.)
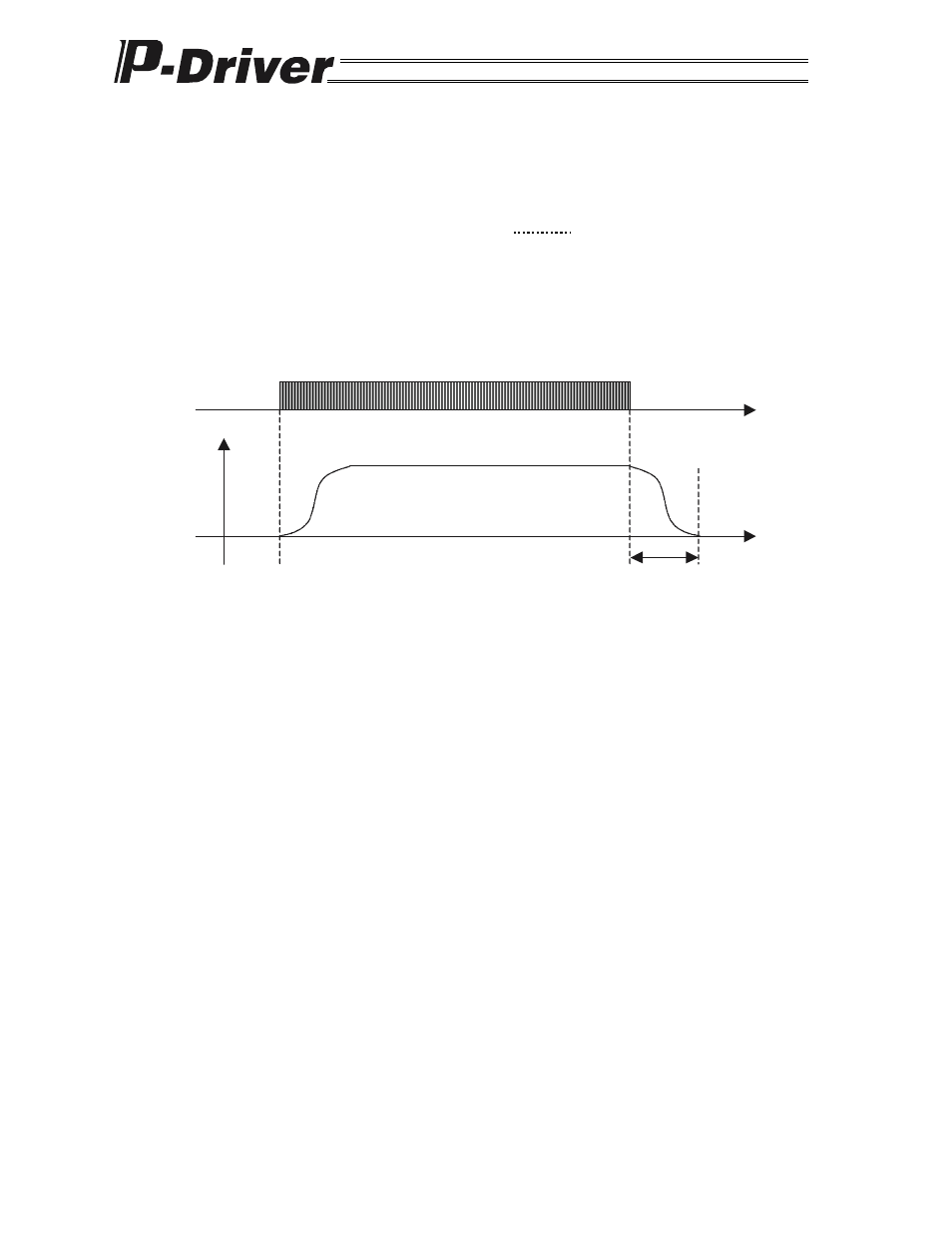
The time required for the positioning loop to settle after a command pulse input stops is approximately
three times the setting value.
For example, if the parameter is set to 100 msec, the settling time is approximately 300 msec.
The setting at shipment from the factory is 0 msec and the settling time is adjusted to approximately 150
msec.
Pulse train
Settling time
Speed