Configuration, 1 operating modes, 1 general – BEI Sensors THK4 User Manual
Page 11: 2 mode: preoperational, 3 mode: start - operational, 4 mode: stopped
www.beisensors.com
page
11/57
4. Configuration
The purpose of this chapter is to describe the configuration parameters of the absolute rotary encoder with
CANopen interface.
4.1 Operating Modes
4.1.1 General
The encoder accesses the CAN network after
powerup in pre-operational mode:
BootUp Message: 700 hex + Node Number
It is recommended that the parameters can be
changed by the user when the encoder is in
preoperational mode. Pre-operational mode
entails reduced activity on the network, which
simplifies the checking of the accuracy of the
sent/received SDOs. It is not possible to send or
receive PDOs in pre-operational mode.
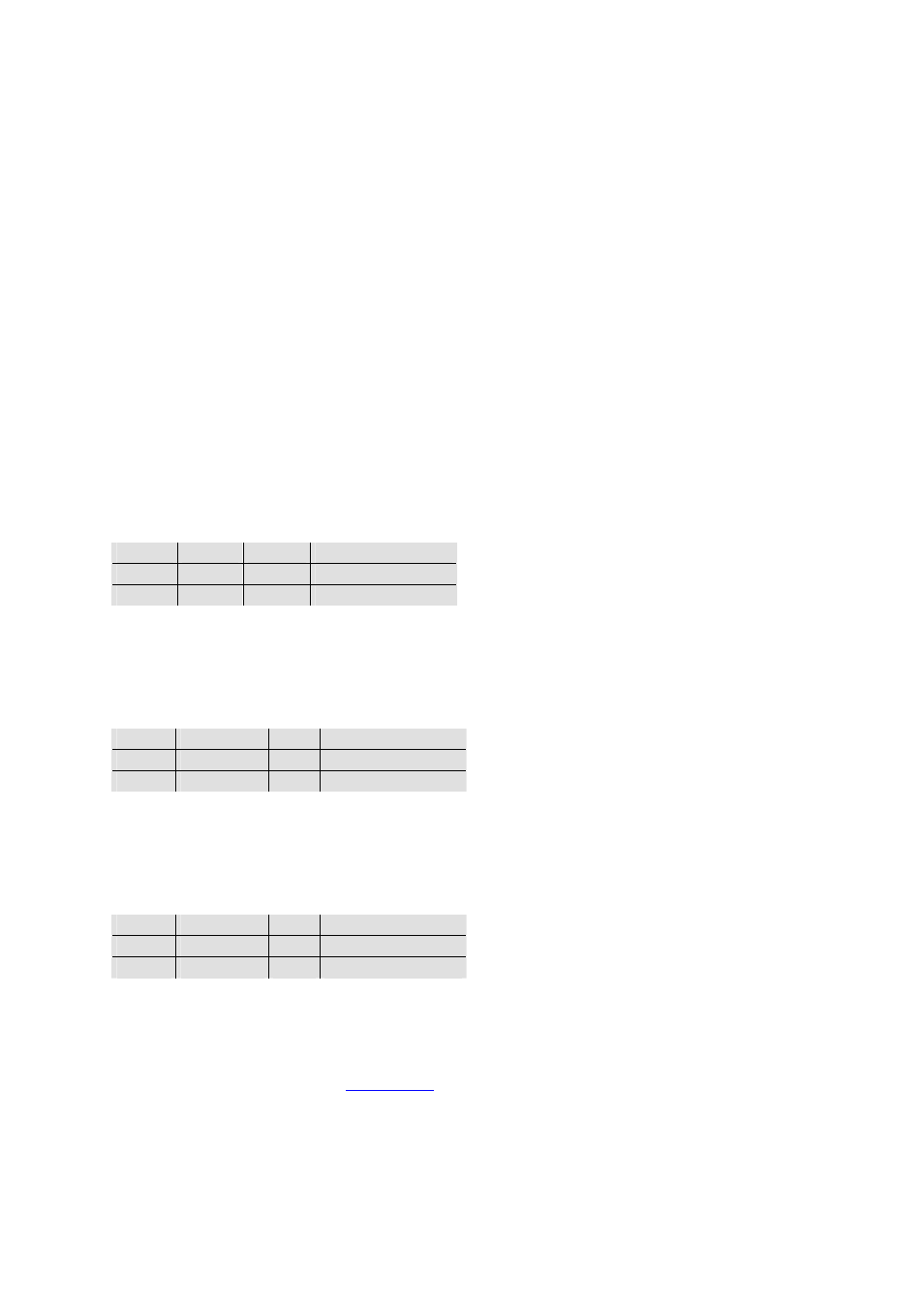
4.1.2 Mode: Preoperational
To set a node to pre-operational mode, the master must send the following message:
Identifier
Byte 0
Byte 1
Description
0 h
80 h
00
NMT-PreOp, all nodes
0 h
80 h
NN
NMT-PreOp, NN
NN: node number
It is possible to set all nodes (Index 0) or a single node (Index NN) to pre-operational mode.
4.1.3 Mode: Start - Operational
To put one or all nodes in the operational state, the master have to send the following message:
Identifier
Byte 0
Byte 1
Description
0 h
01 h
00
NMT-Start, all nodes
0 h
01 h
NN
NMT-Start, NN
NN: node number
It is possible to set all nodes (Index 0) or a single node (Index NN) to operational mode.
4.1.4 Mode: Stopped
To put one or all nodes in the stopped state, the master have to send the following message:
Identifier
Byte 0
Byte 1
Description
0 h
02 h
00
NMT-Stop, all nodes
0 h
02 h
NN
NMT-Stop, NN