9 pid controller – Siemens MICROMASTER 440 User Manual
Page 63
Issue 10/06
6 Commissioning
MICROMASTER 440
Operating Instructions (Compact)
63
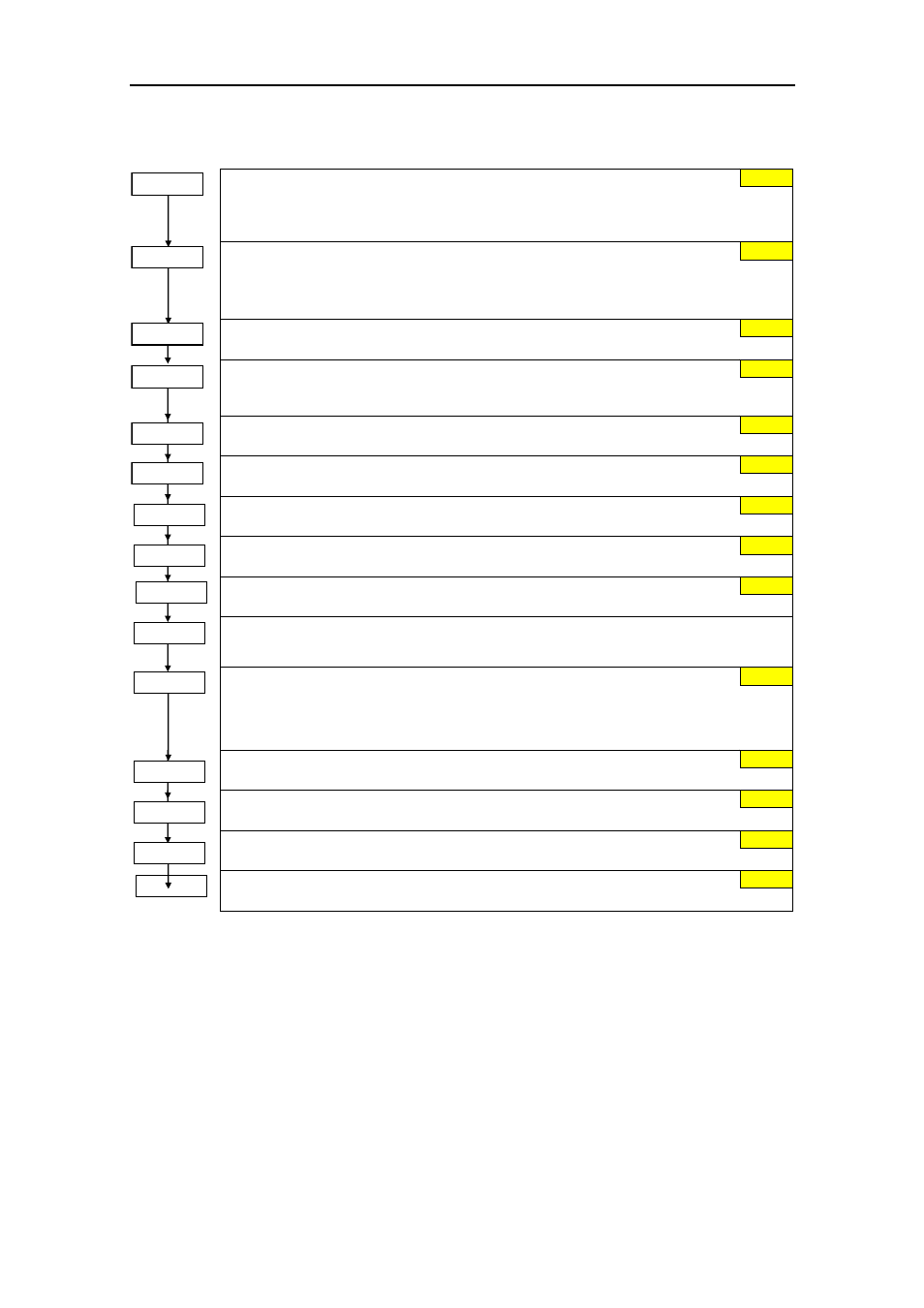
6.4.18.9 PID
controller
BI: Enable PID controller
PID mode Allows user to enable/disable the PID controller. Setting to 1 enables the PID
controller. Setting 1 automatically disables normal ramp times set in P1120 and P1121 and
the normal frequency setpoints.
PID
mode
Configuration of PID controller.
0 PID as setpoint
1 PID as trim
CI: PID setpoint
Defines setpoint source for PID setpoint input.
CI: PID trim source
Selects trim source for PID setpoint. This signal is multiplied by the trim gain and added to
the PID setpoint.
Ramp-up time for PID setpoint
Sets the ramp-up time for the PID setpoint.
Ramp-down time for PID setpoint
Sets ramp-down time for PID setpoint.
CI: PID feedback
Selects the source of the PID feedback signal.
Max. value for PID feedback
Sets the upper limit for the value of the feedback signal in [%]..
P2268 =...
Min. value for PID feedback
Sets lower limit for value of feedback signal in [%]..
CO: PID
error
Displays PID error (difference) signal between setpoint and feedback signals in [%].
PID derivative time
Sets PID derivative time.
P2274 = 0:
The derivative term does not have any effect (it applies a gain of 1).
PID proportional gain
Allows user to set proportional gain for PID controller.
PID integral time
Sets integral time constant for PID controller.
PID output upper limit
Sets upper limit for PID controller output in [%].
P2292 =...
PID output lower limit
Sets lower limit for the PID controller output in [%].
0.0
0.0
0.0
1.00 s
1.00 s
755.0
100.00 %
0.00 %
3.000
0.000 s
100.00 %
0.00 %
P2291 =...
P2285 =...
P2280 =...
0
r2251 =...
0.000
P2274 =...
r2273 =...
P2200 =...
P2253 =...
P2254 =...
P2257 =...
P2258 =...
P2264 =...
P2267 =...