2 motor data identification, 3 magnetizing current – Siemens MICROMASTER 440 User Manual
Page 32
6 Commissioning
Issue 10/06
MICROMASTER 440
32
Operating Instructions (Compact)
6.2
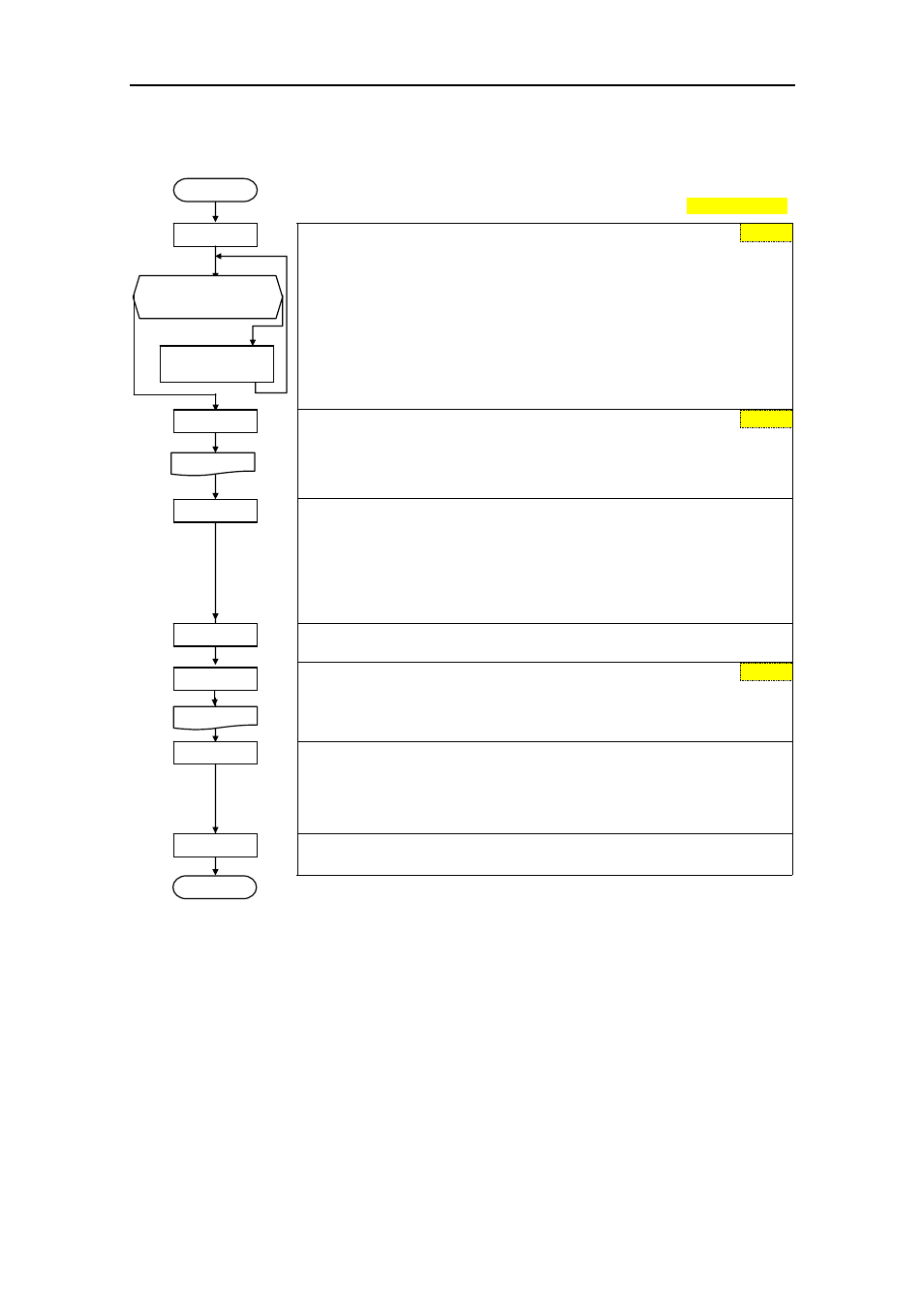
Motor data identification
Factory setting
Ambient motor temperature
(entered in °C)
The motor ambient temperature is entered at the instant that motor data is
being determined (factory setting: 20 °C).
yes no
The difference between the motor temperature and the motor ambient
temperature P0625 must lie in the tolerance range of approx. ± 5 °C. If this is
not the case, then the motor data identification routine can only be carried-out
after the motor has cooled down.
Select motor data identification
with P1910 = 1
p1910 = 1: Identifies the motor parameter with parameter change.
These are accepted and applied to the controller.
When p1910 = 1 is selected, Alarm A0541 (motor data identification active)
is output, and internally p0340 is set to 3.
Starts the motor data identification run
with p1910 = 1
The measuring operation is initiated with the continuous (steady-state) ON
command. The motor aligns itself and current flows through it. Diagnostics is
possible using r0069 (CO: Phase current).
After the motor data identification routine has been completed, p1910 is reset
(p1910 = 0, motor data identification routine inhibited) and Alarm A0541 is
cleared (deleted).
In order to set the frequency converter into a defined state, an OFF1 command
must be issued before the next step.
Select motor data identification
with P1910 = 3
p1910 = 3: Identifies the saturation characteristic with parameter change.
When p1910 = 3 is selected, Alarm A0541 (motor data identification active)
is output and internally, p0340 is set to 2.
Starts the motor data identification run
with P1910 = 3
The measuring operation must be started with a continuous ON command.
After the motor identification routine has been completed, p1910 is reset
(p1910 = 0, motor data identification routine inhibited) and Alarm A0541 is
cleared (deleted).
In order to set the frequency converter into a defined state, an OFF1 command
must be issued before the next step.
6.3 Magnetizing
current
¾
The value of the magnetizing current r0331/P0320 has a significant influence on
the closed-loop control. This cannot be measured at standstill. This means that
the value is estimated for standard 4-pole 1LA7 Siemens standard using the
automatic parameterization P0340=1 (P0320=0; result in r0331).
¾
If the deviation of the magnetizing current is too high, then the values for the
magnetizing reactance and those of the rotor resistance will not be able to be
accurately determined.
¾
Especially for third-party motors it is important that the magnetizing current
that is determined, is carefully checked and if required, appropriately corrected.
START
P0625 = ?
20 °C
| Motor temp. - P0625|
≤ 5 °C ?
Allow the motor
to cool down
P1910 = 1
0
A0541
ON
OFF1
P1910 = 3
0
A0541
ON
OFF1
END