1 sensorless vector control (slvc) – Siemens MICROMASTER 440 User Manual
Page 51
Issue 10/06
6 Commissioning
MICROMASTER 440
Operating Instructions (Compact)
51
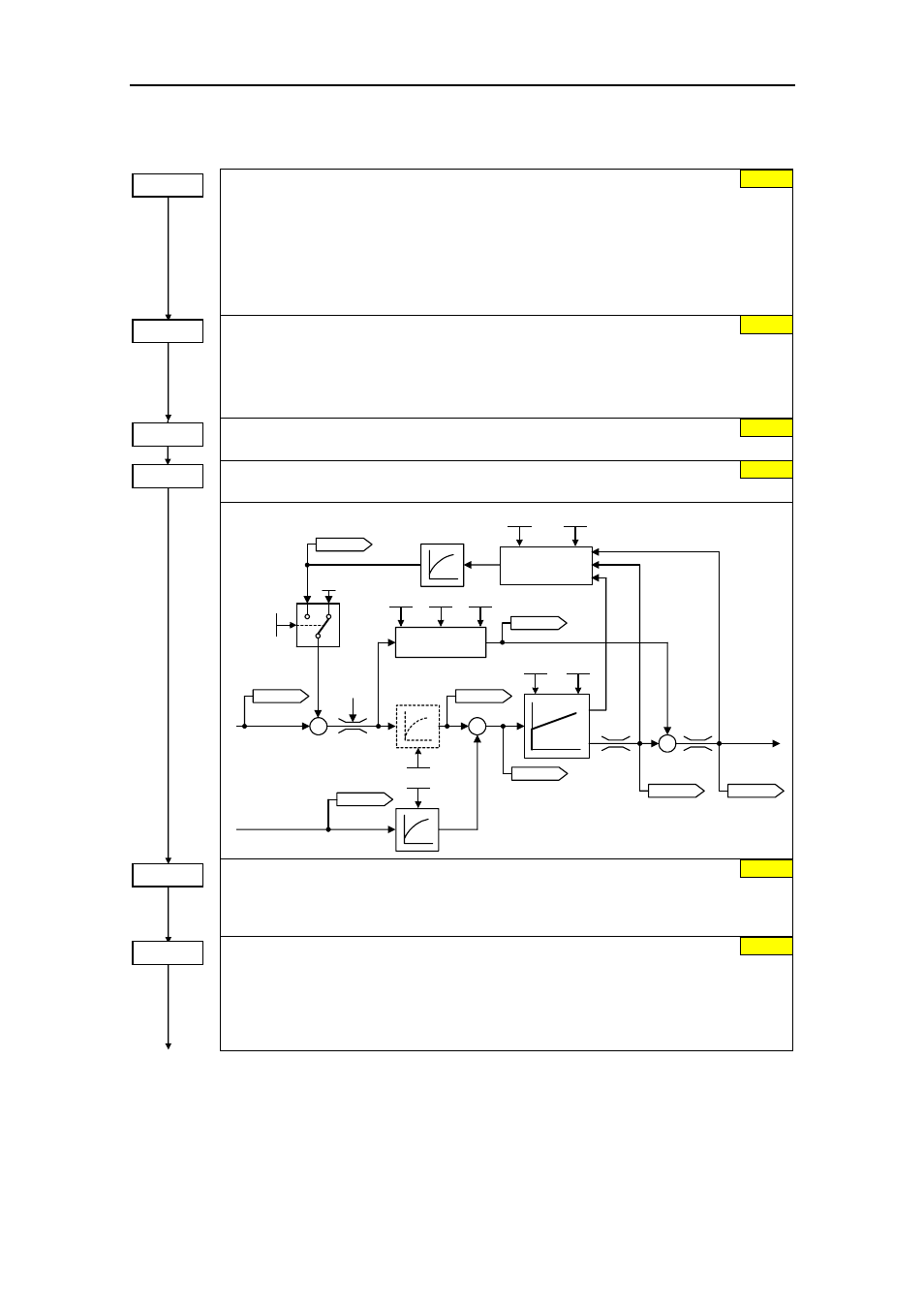
6.4.17.1
Sensorless vector control (SLVC)
Control mode
20 Closed-loop Vector control – speed without encoder
SLVC can provide excellent performance for the following types of application:
• Applications which require high torque performance
• Applications which require fast respond to shock loading
• Applications which require torque holding while passing through 0 Hz
• Applications which require very accurate speed holding
• Applications which require motor pull out protection
Filter time for act. freq (SLVC)
Sets time constant of PT1 filter to filter the frequency deviation of speed controller in
operation mode SLVC (sensorless vector control).
Decreasing the value leads to a higher dynamic of the speed regulation. Instability is seen
if the value is to low (or to high). p1452 = 2 can be set for most applications.
Gain speed controller (SLVC)
Enters gain of speed controller for sensorless vector control (SLVC).
Integral time n-ctrl. (SLVC)
Enters integral time of speed controller for sensorless vector control (SLVC).
r1438
r1084
–
Kp
Tn
p1470 p1472
r0064
p1496 p0341 p0342
p1489
p1488
p1452
Act. frequency
from observer model
r0063
r1170
–
Precontrol
Freq. setpoint
Torque
setpoint
Droop
150 ms
r1518
p1492
r1490
0
1
0
r0079
r1508
*)
*) only active, if pre-control is enabled
(p1496 > 0)
Continuous torque boost (SLVC)
Sets continuous torque boost in lower frequency range of SLVC (sensorless vector control).
Value is entered in [%] relative to rated motor torque r0333.
p1610 is only effective in the open-loop mode between 0 Hz and approx.
±p1755.
Acc. torque boost (SLVC)
Sets acceleration torque boost in lower frequency range of SLVC (sensorless vector
control). Value is entered in [%] relative to rated motor torque r0333.
p1611 is only effective in the open-loop mode between 0 Hz and approx.
±p1755.
In opposite to p1610 the acceleration torque boost p1611 is only in operation during
acceleration/deceleration.
0
P1300=20
P1452 = ...
P1470 = ...
P1472 = ...
P1610 = ...
P1611 = ...
4 ms
3.0
400 ms
50.0 %
0.0 %