2 vector control with encoder (vc) – Siemens MICROMASTER 440 User Manual
Page 53
Issue 10/06
6 Commissioning
MICROMASTER 440
Operating Instructions (Compact)
53
6.4.17.2
Vector control with encoder (VC)
¾
First step: Parameterizing the speed encoder (refer to Section 6.4.15)
¾
When commissioning Vector Control with encoder-feedback (VC), the drive
should be configured for V/f mode (see p1300) first. Run the drive and compare
r0061 with r0021 that should agree in:
− sign
− magnitude (with a deviation of only a few percent)
Only if both criteria are fulfilled, change p1300 and select VC (p1300 = 21/23).
¾
Encoder loss detection must be disabled (p0492 = 0) if torque is limited
externally., e.g.:
− closed-loop winder control
− traversing / moving to a fixed endstop
− when using a mechanical brake
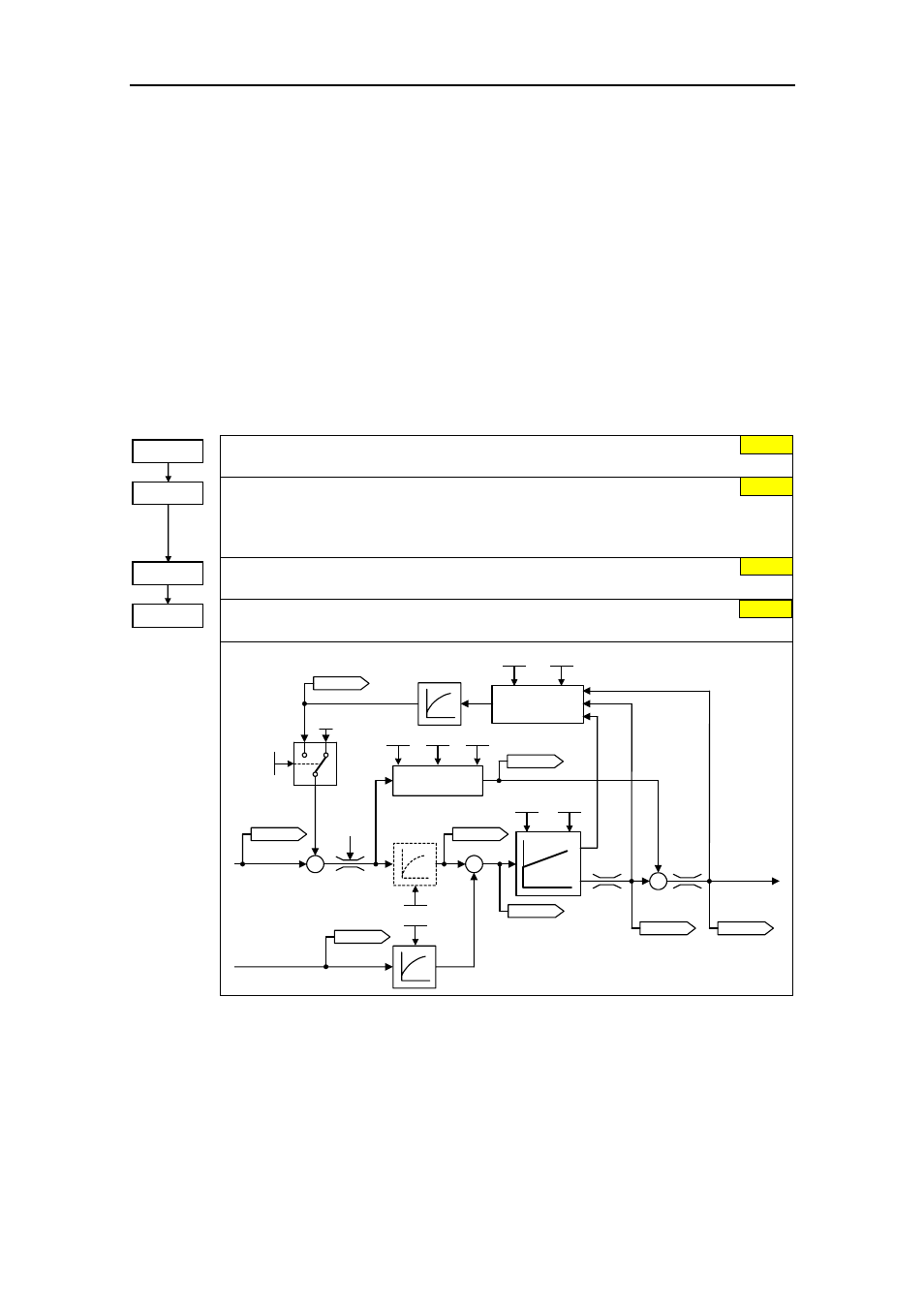
Control mode
21 Vector control with sensor
Filter time for act. speed
Sets time constant of PT1 filter to smooth actual speed of speed controller.
Decreasing the value leads to a higher dynamic of the speed regulation. Instability is seen if
the value is to low. p1442 = 2 can be set for most applications.
Gain speed controller
Enters gain of speed controller.
Integral time speed controller
Enters integral time of speed controller.
Precontrol
Freq. setpoint
r1438
r1084
–
Kp
Tn
p1460 p1462
r0064
Torque
setpoint
p1496 p0341 p0342
p1442
Act. frequency
from encoder
r0063
r1170
–
p1492
p1489
p1488
Droop
r1490
150 ms
r1518
0
1
0
r0079
r1508
*) only active, if pre-control is enabled
(p1496 > 0)
*)
P1300=21
0
4 ms
3.0
P1442 = ...
P1460 = ...
P1462 = ...
400 ms