FeiYu Tech FY-Panda2 Autopilot User Manual
Page 49
Guilin Feiyu Electronic Technology Co., Ltd.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com [email protected]
Page 48
positioning success. At the same time you can see the icon of the aircraft on the GCS
software.
( 9 ) Setting a simple routes, for example, you can set a rhombus routes ,its length
is about 500 meters , the height of Waypoint is 200 meters.
(10)
Set the Home point:
After power on,PandaⅡ will take the GPS first location
point as Home Point. But you also can through button to set the new Home
Point.
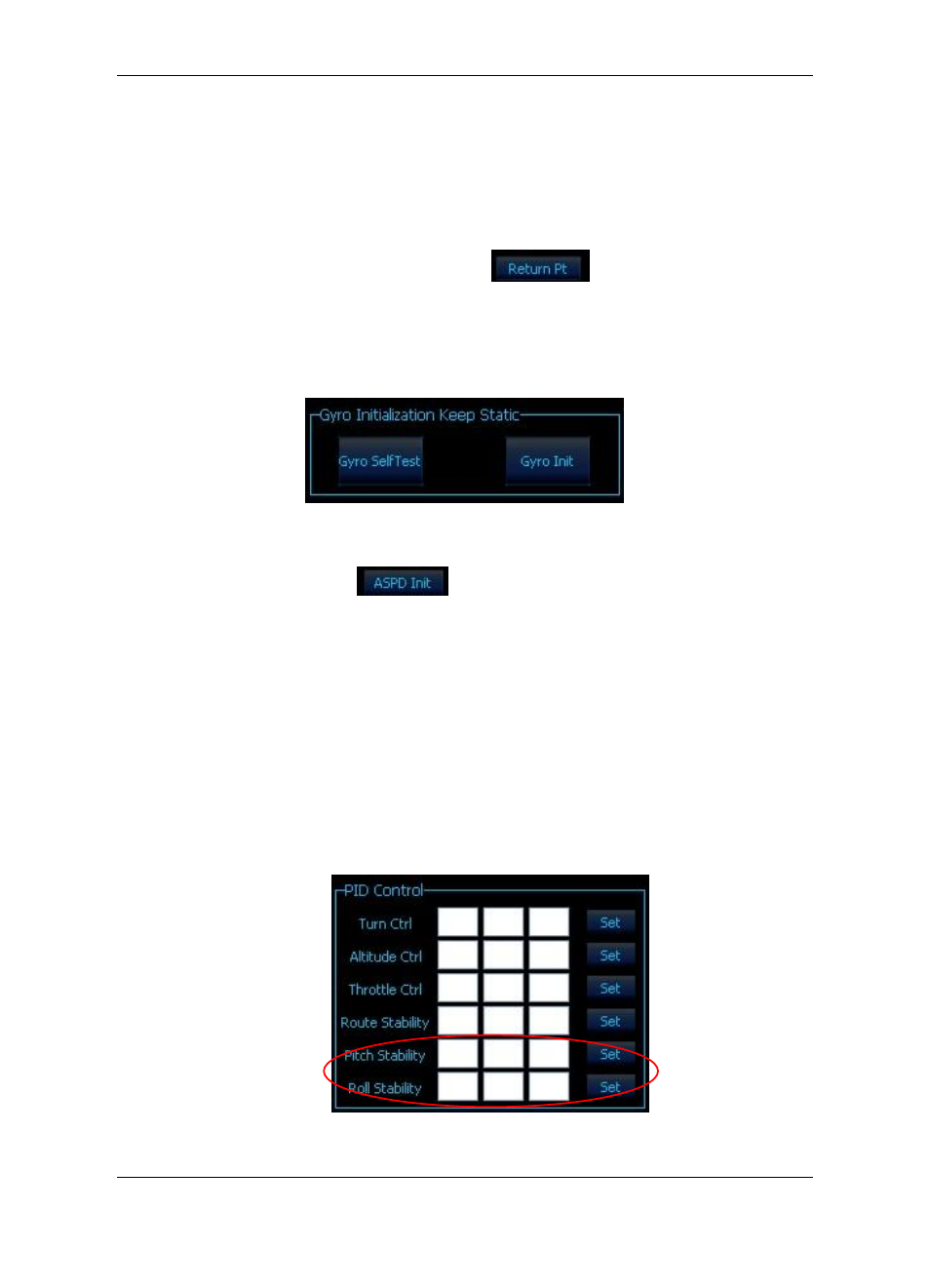
(11)
Gyro Initialization:
Please click on the
―Gyro Init‖ button to do the gyro reset.
Attention:
During the gyro reset, please keep the Panda
Ⅱ static and you can not to
do the gyro rest during the flight. It
‘s better to do the gyro reset before each flight.
(12) Initialization of the airspeed: Put the aircraft keep static, you can use your
hand to cover the port of the airspeed , and do not let the wind interfere with the airspeed
sensor, then click the button .After that please check whether the
airspeed showing on GCS is in the vicinity of 0-3.Due to the sensor error, there are some
tiny airspeed value on the ground is normal.
(13)
Take off:
Now you can take off at
―Stabilized Mode‖ or ―Manual Mode‖.
(14)
Through the RC stick to trim the plane to level fly. Manually to change the
plane roll and pitch, etc., to observe the plane automatic balance situation. If recover to
balance is too quick, don't feel flexible operation you can reduce corresponding channel
control gain; If the pitch, roll and orientation rapid shaking, or flight speed increases
appear sloshing, you need reduce corresponding control channel gain; If recover to
balance is too slow, the poor control ability is require you to increase control gain.
(15)
Alternately, you may use your transmitter trims to level the aircraft in Auto